

2.8.3.Торможение противовключением (тпв)
![]()

Условия реализации:
![]()
![]()

Пусть
![]() тогда
тогда
![]() и
и
![]() и
и
![]()
Пусть
![]() тогда
тогда
![]() и
и
![]() и
и
![]()
Условия попадания в режим ТПВ:
Режим возникает, если двигатель подготовлен для вращения в одну сторону, а силами нагрузки или по инерции вращается в противоположную.
Мс3>Мс2>Мс1 3<2<1, 3<0. При =0 выходим на границу режима ТПВ.
работа в точке (1).
Поменяем знак напряжения: при внезапном изменении на противоположную полярность двигатель не успевает изменить скорости и его рабочая точка перемещается на вторую рабочую характеристику в точку (4). После остановки двигатель начнет разгон в противоположную сторону, пройдет зону двигательных режимов и, если характер нагрузки - постоянство активного момента, выйдет в зону РТ (точка (5)).
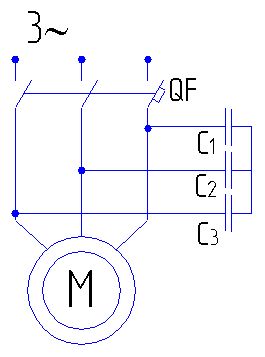
Схемотехника режима ТПВ:
Судя по формуле в режиме ТПВ ток якоря определяется не разностью, а суммой напряжения питания и ЭДС для ограничения тока якоря вводят добавочное сопротивление:
![]()
Rдоб необходимо!!! Иначе ток якоря может превысить номинальный ток в 5-7 раз.
Введение добавочного сопротивления смягчает характеристику, она становится близкой к постоянству момента при имитации средствами электропривода постоянства момента используют режим ТПВ.
И![]() спользование
ТПВ для снятия механических характеристик:
спользование
ТПВ для снятия механических характеристик:
М1 – испытуемый двигатель;
М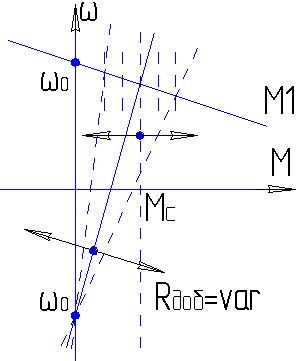 2
– нагрузочная машина.
2
– нагрузочная машина.
Необходимо разработать схему для снятия точек механической характеристики М1, путем изменения Мс.
Желательно, чтоб механические характеристики нагрузочной машины были возможно ближе к Мс()=const (нет зависимости Мс от ).
Для реализации используют глубокое противовключение.
На практике ТПВ чаще всего используется как элемент реверса, для форсированного разгона в противоположную сторону.

Для управления торможением следует предусмотреть изменение Rдоб.
Замыканием контакторов КМ1, КМ2 можно ступенчато изменять нагрузку, имитируя скачкообразное приложение внешней нагрузки, например при врезании инструмента в заготовку.
2.9.Тормозные режимы ад.
Для АД также существуют три режима торможения, различных по энергетике:
2.9.1.Рекуперативное торможение (рт)
Условие создания:
Перевод двигателя в генераторный режим, путем увеличения скорости выше синхронной >0. При этом s<0, то есть ротор обгоняет поле, двигатель будет развивать отрицательный момент.
О
 собенностью
РТ является невозможность его получения
без сети, так как необходимо создание
поля ротора в момент s=0,
то есть необходимо потребление реактивной
мощности из сети.
собенностью
РТ является невозможность его получения
без сети, так как необходимо создание
поля ротора в момент s=0,
то есть необходимо потребление реактивной
мощности из сети.
Таким образом АД всегда потребляет активную мощность, в том числе и в генераторном режиме.
С этим приходится считаться при проектировании электродвигателя для транспортных механизмов.
Автономное торможение (без сети) возможно только при наличии внутреннего источника реактивной мощности. Таким источником может служить конденсаторная батарея:
2.9.2.Динамическое торможение (дт)
Д инамическое
торможение осуществляется чаще всего
при переключении на ходу обмотки статора
от источника переменного тока на источник
постоянного тока.
инамическое
торможение осуществляется чаще всего
при переключении на ходу обмотки статора
от источника переменного тока на источник
постоянного тока.
Размыкание КМ1 отключает двигатель от сети; замыкание КМ2 – подача постоянного тока в обмотку.
![]()
![]()
На постоянном токе
![]() и
и
![]() ,
что много меньше
,
что много меньше
![]() от переменного тока.
от переменного тока.
Поэтому необходимо
Rдоб, которое дает
![]() .
.
Контакторы КМ1 и КМ2 должны работать с разнесением по времени. Многие отечественные станки этого не предусматривают, что приводит к выгоранию контактора.
Механические характеристики режима ДТ:
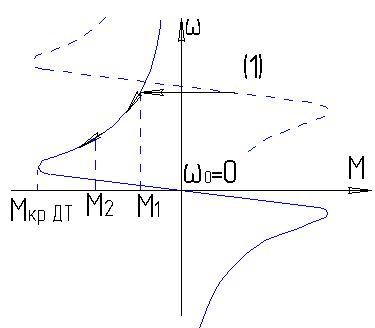
![]()
МкрДТ>>Мном, что приводит к отрицательным механическим явлениям.
М1<М2<...
ДТ существует, пока есть постоянный ток в цепи статора ток необходимо выключать после остановки двигателя. Это приводит к тому, что, не желая связываться с контролем скорости, постоянный ток управляется функцией времени.
За рубежом под ДТ понимается другое: инверторное торможение, которое по энергетике совпадает с РТ, например при снижении частоты.
У большинства станочных приводов нет возврата энергии в сеть (рекуператора) энергия из звена постоянного тока рассеивается на специальном тормозном сопротивлении.
Энергия при ДТ выделяется в роторе при частых торможениях возможен перегрев двигателя с обрывом стержней ротора для такой работы режим лучше не использовать.