

2.7.2.Фазовый способ регулирования
U1=var; 1=const; 0=const.
В каждую фазу включается тиристорный регулятор:
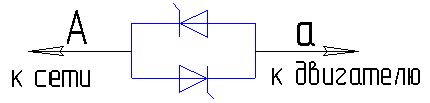
![]()

U 2>U1>Uест
2>U1>Uест
U4<U3<Uест
ГОСТ оговаривает допустимое снижение напряжения не более, чем на 5%, а увеличение – не более, чем на 10%.

Энергетика фазового способа регулирования:
Предположим, что искусственные характеристики сформированы из неустойчивой части характеристики. Это можно сделать, если ввести обратную связь по скорости.

РН – регулятор напряжения (теристорный);
РС – регулятор скорости;
Искусственная характеристика на пониженной скорости:
 0=const
0=const
Р~
Если 0, то РРэм.
Потери при этом выделяются в роторе двигателя, что приводит к его быстрому перегреву.
Заключение:
в разомкнутых системах возможно регулирование в небольшом диапазоне скоростей на жесткой части характеристики;
перегрузочная способность двигателя зависит от напряжения (опасность "опрокидывания" двигателя);
в замкнутых системах возможно получение низких скоростей, но при этом значительная часть потребляемой энергии, пропорциональная скольжению, переводится в потери. Для борьбы с потерями можно либо завышать габарит двигателя, либо занижать нагрузку.
Вывод: сфера применения этого способа управления двигателем это привода с невысокими регулировочными требованиями (малый диапазон регулирования скоростей) и привода, редко и непродолжительно работающие на низкой скорости.
2.7.3.Р егулирование изменением сопротивления обмоток


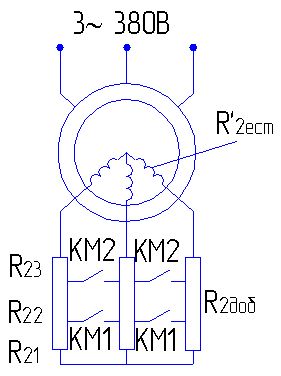
sk3>sk2>sk1>skест
R'23>R'22>R'21>R'2ест
Э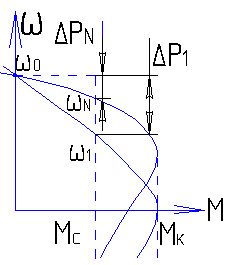 нергетика
способа регулирования изменением
сопротивления обмоток:
нергетика
способа регулирования изменением
сопротивления обмоток:
![]()
- мощность, развиваемая электромагнитным полем статора.
![]() - мощность на валу.
- мощность на валу.
![]()
![]()
Увеличение Р1 ведет к пропорциональному увеличению R'2доб, и, как следствие, к нагреву.
Достоинства: простота и дешевизна.
Целесообразные области применения:
в крановых механизмах (кратковременная работа на малых скоростях, при этом плохая энергетика несущественна);
в металлургических приводах, работающих в особо тяжелых условиях (формирование Мпуск=Мкр);
в транспортных механизмах, где возможна работа на упор (вводя R'2 очень большим – снижаем Мпуск до [Мдоп]);
Двигатели с фазным ротором дороже, чем с короткозамкнутым реже применяются в станочном деле.
2.7.4.Регулирование изменением числа пар полюсов
Такой способ регулирования реализуется практически в двигателях с короткозамкнутым ротором, где переключение полюсов производится в обмотке статора, обмотка ротора при этом автоматически приспосабливается к избранному числу полюсов. Если использовать двигатель с фазным ротором, то переключение числа полюсов на статоре потребует одновременного переключения числа полюсов и на роторе, что усложнит конструкцию, поэтому для этого способа регулирования практически используются асинхронные двигатели с короткозамкнутым ротором, в которых чаще всего переключение полюсов осуществляется изменением направления тока в отдельных половинах каждой фазной обмотки.
Каждая фазная обмотка состоит из двух полу обмоток. На развертке это выглядит следующим образом:



Картина магнитных силовых линий в двигателе повторяется через период сети Т. Магнитное поле при этом находится во вращательном движении. В результате для однополюсной (р=1) машины поле за период сети выполняет полный оборот, а для двухполюсной (р=2) – полу оборот. Этим достигается электромагнитная редукция скорости.
Синхронная скорость магнитного поля двигателя определяется по формуле:
![]()
П ри
р=1 0=314 рад/с;
при р=2 0=157
рад/с; при р=3 0=105
рад/с…
ри
р=1 0=314 рад/с;
при р=2 0=157
рад/с; при р=3 0=105
рад/с…
Область применения:
лифтовое хозяйство
При р=8 Мкр больше, чем при р=2.
![]()
Главные привода вращательного движения (для них характерно постоянство мощности нагрузки)

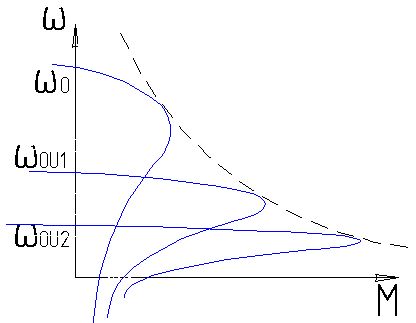
С ростом Мкр
получаем ряд скоростей, которые
закладываются в проекты станков;
выглядит, как геометрическая прогрессия
со знаменателем
![]() .
.
Можно уменьшать число ступеней механической коробки передач.