

2.6.Статические характеристики ад
АД называют также Induction Motor.

![]()
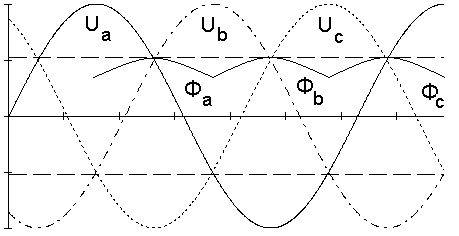
Потоки, создаваемые любой обмоткой синусоидальны и сдвинуты на 120 друг относительно друга, как и напряжения.
В результате Ф∑ будет представлять собой вращающийся вектор постоянного модуля, проекции которого на магнитные оси фазных обмоток синусоидальны.
Таким образом трехфазная система обмоток позволяет сформировать вращающееся магнитное поле, в котором находятся проводники ротора.
В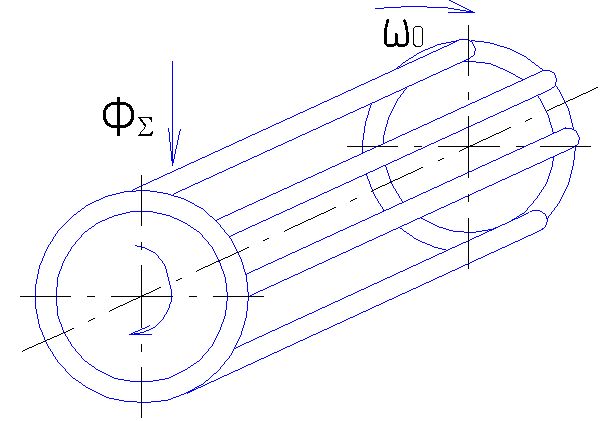 ращающееся
магнитное поле создает токи в проводниках
ротора, которые, в свою очередь,
взаимодействуя с магнитным полем
статора, создают электромагнитный
момент.
ращающееся
магнитное поле создает токи в проводниках
ротора, которые, в свою очередь,
взаимодействуя с магнитным полем
статора, создают электромагнитный
момент.
Величина этого момента зависит от скорости поля статора и сопротивления ротора.
0 – угловая скорость поля;
– угловая скорость ротора.
При 0= момента не будет для работы принципиально необходимо отставание ротора от поля статора (скольжение).
S – скольжение.
![]()
sном=0,03…0,07
0 также называют синхронной скоростью, а сам двигатель – асинхронным.
 - формула Клосса (упрощенная), где sк
– критическое скольжение, а Мк –
критический момент.
- формула Клосса (упрощенная), где sк
– критическое скольжение, а Мк –
критический момент.
Здесь следует подчеркнуть весьма важное для практики обстоятельство – влияние изменения напряжения сети на механические характеристики асинхронного двигателя. Двигатель этого типа чувствителен к колебаниям напряжения сети.
Критическое скольжение и угловая скорость идеального холостого хода не зависят от напряжения.
s =0
при =0;
=0
при =0;
=0 при s=1.
Критические точки:
При s<<sk
получим
![]() ,
тогда
,
тогда
![]()
При s>>sk
получим
![]() ,
тогда
,
тогда
![]()
Физический смысл: на жесткой части характеристики (рабочей части) скольжение мало частота токов низкая (порядка 3…7Гц).
Основную роль в ограничении токов ротора играет активное сопротивление ротора.
![]() ,
где Xp
– индуктивное сопротивление ротора.
,
где Xp
– индуктивное сопротивление ротора.
![]() ,
где
,
где
![]()
![]() - частота токов ротора.
- частота токов ротора.
При уменьшении этой
частоты уменьшается и угловая скорость
ротора, что ведет к уменьшению индуктивного
сопротивления ротора Xp<<Rp
![]()
При больших скольжениях,
когда частота токов ротора возрастает,
увеличивая тем самым угловую скорость
ротора, что ведет к увеличению индуктивного
сопротивления ротора Xp>>Rp
![]()
Мягкий участок характеристики формируется за счет ограничения тока индуктивным сопротивлением ротора, которое растет по мере роста скольжения. С уменьшением токов ротора уменьшается и момент.
Разгон двигается сначала происходит по мягкой характеристике.
![]() ,
где р – число пар полюсов.
,
где р – число пар полюсов.
П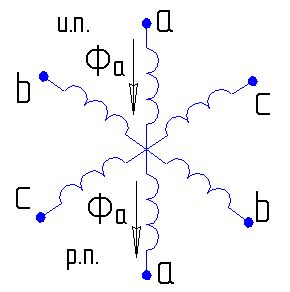 оявление
второй обмотки приводит к тому, что
картина магнитных силовых линий будет
повторяться не через полный период, а
через полпериода.
оявление
второй обмотки приводит к тому, что
картина магнитных силовых линий будет
повторяться не через полный период, а
через полпериода.
и.п. – исходное положение;
р.п. – рабочее положение;
Т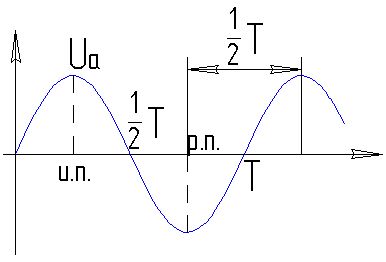 – период.
– период.
Возможна постановка дополнительной обмотки для увеличения числа пар полюсов. В итоге синхронная скорость уменьшается в два раза.
Для нахождения синхронной скорости по номинальной можно использовать таблицу.
p |
1 |
2 |
3 |
4 |
0, рад/с |
314 |
157 |
105 |
78,5 |
n0, об/мин |
3000 |
1500 |
1000 |
750 |