

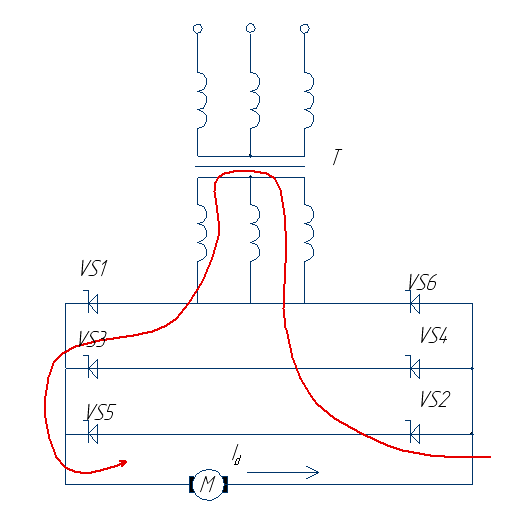
4. Мостовая схема выпрямления.
У![]()
 правление
преобразователь – выпрямитель.
правление
преобразователь – выпрямитель.
VS1, VS2 - открыты
VS3, VS2 – следующий такт
VS3, VS4
VS5, VS4
VS5, VS6
VS1, VS6
6 состояний за период сети
6 – ти импульсная схема
Id всегда протекает по 2 –м обмоткам транзистора и по 2 – м тиристорам. Нагрузка подключается обеими концами к вентильной схеме.
Регулировочная характеристика:
![]()
![]() ,
р=6
,
р=6
5. Реверсивные преобразователи
Для обеспечения реверса тока и момента двигателя используется 2 комплектные схемы преобразования.
Например: 2-х комплектная мостовая схема.

![]()

R→0 => I→∞ => к.з., чтобы этого не было, нужно раздельное управление тиристорами (комплектами).
«Раздельное управление » достигается разрешением (или запрещением) импульсов на отдельный комплект.
«Совместное управление». Для этого нужно специальным образом согласовывать управление комплектами, силовое оборудование при этом усложняется, т.к. требуется ограничивать импульсы уравнительных токов между комплектами.
Для организации раздельной схемы управления используются специальные электронные схемы, называемые ЛПУ (логические переключающие устройства).
Их задача – разрешение/запрещение прохождения импульсов.
ЛПУ получает сигнал направления включения (Uупр) и сигнал датчика тока (ДТ) (переключение только в момент отсутствия тока после переданного переключения).
Выходные сигналы ЛПУ - 3В, 3Н (запрет)
Для надежности работы ЛПУ выдерживает паузу перед переключением компонентов τ=0.001с, это нужно для восстановления запирающих свойств тиристоров.
Щетки термоциклируют (то охлаждаются, то нагреваются).
Требования к межламельной изоляции жесткие – должны держать высокую температуру, знакопеременные усилия. Хороший результат дают композиты на основе слюды.
Umax – максимальное напряжение межламельной изоляции. Umax≤15…20 В.
ДПТ не бывают высоковольтными (не более 1000 В).
Единичная мощность двигателя Р≤10∙103 кВт.
2.5.Механические характеристики дпт пв.
Д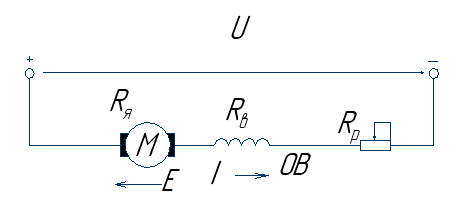 ля
электродвигателя последовательного
возбуждения, принципиальная схема
включения которого представлена
на рис. 1, уравнение электромеханической
характеристики,
так же как и для двигателя независимого
возбуждения, имеет вид:
ля
электродвигателя последовательного
возбуждения, принципиальная схема
включения которого представлена
на рис. 1, уравнение электромеханической
характеристики,
так же как и для двигателя независимого
возбуждения, имеет вид:
Рис.2
где R — суммарное сопротивление якорной цепи, состоящее из сопротивления обмотки якоря, обмотки возбуждения и сопротивления внешнего резистора .
В отличие от двигателя независимого возбуждения здесь магнитный поток Ф является функцией тока якоря I. Эта зависимость, приведенная на рис. 1, носит название кривой намагничивания. Так как нет точного аналитического выражения для кривой намагничивания, то трудно дать и точное аналитическое выражение для механической характеристики двигателя последовательного возбуждения.
Если для упрощения анализа предположить, пренебрегая насыщением магнитной системы, линейную зависимость между потоком и током якоря, как это показано пунктиром на рис.2. , то есть считать Ф=αI, то момент двигателя
![]()

![]()
Ф0 – участок насыщения.
Рис.2
![]()
 - с ростом тока момент резко увеличивается.
- с ростом тока момент резко увеличивается.
![]()
Скоростная характеристика:
![]()
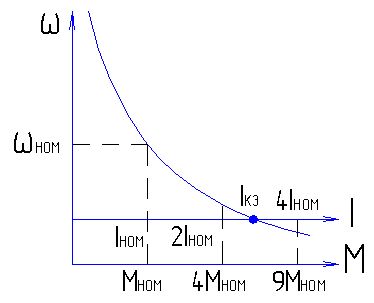
Этот график справедлив для первого участка характеристики связи между потоком и током якоря.
Удобны для ПТМ, работающих с большими перегрузками; механизмов, типа стрелочных переводов; везде, где требуется развивать большой момент в начале движения.
НО: механизм не допускает холостой ход совсем без нагрузки, так как при этом скорость неограниченно возрастает и двигатель идет вразнос.
При Ф=Ф0=const характеристики идентичны характеристикам ДПТ НВ.
Обычно это зона больших токов, она находится вне рабочей зоны.
П ерегрузочная
способность ДПТ ПВ больше, чем у ДПТ НВ.
ерегрузочная
способность ДПТ ПВ больше, чем у ДПТ НВ.
![]()
ДПТ ПВ экономичнее, чем ДПТ НВ, так как обмотка возбуждения греется только под нагрузкой.