

13. Инварианты напряженного состояния. Интенсивность напряжений. Наибольшие касательные напряжения.
Г лавные
напряжения являются корнями кубического
уравнения (подробности
получения его опускаем):
лавные
напряжения являются корнями кубического
уравнения (подробности
получения его опускаем):

М аксимальное
главное напряжение (в
алгебраическом смысле)
–
аксимальное
главное напряжение (в
алгебраическом смысле)
–
Минимальное главное напряжение –

З начения
корней кубического уравнения зависят
от коэффициентов, стоящих при различных
степенях
начения
корней кубического уравнения зависят
от коэффициентов, стоящих при различных
степенях
В свою очередь, значения этих коэффициентов не зависят от выбора системы координат:
они инвариантны к системе координат.
Их называют: инварианты напряженного состояния S
(соответственно, первый, второй, третий инварианты):

Тогда кубическое уравнение примет вид:

Интенсивность напряжений
В сопромате и теории упругости при проведении расчетов используются так называемые теории прочности (будут рассмотрены ниже).
При разработке этих теорий вводится гипотеза о преимущественном влиянии на прочность материала того или иного фактора (критерия). Таким образом, предусматривается возможность проверки этого критерия сопоставлением данного (сложного) напряженного состояния с простым (обычно с одноосным).
П ри
этом устанавливается значение
эквивалентного (расчетного)
напряжения
ри
этом устанавливается значение
эквивалентного (расчетного)
напряжения
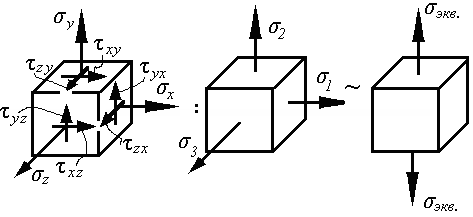
В теории упругости эквивалентные напряжения называют интенсивностью напряжений

Наибольшие касательные напряжения
Анализ напряженных состояний позволяет определить величину максимальных касательных напряжений.
Эти напряжения (доказано в теории упругости и подтверждается экспериментально) «ответственны» за пластическую деформацию тела.
М аксимальное
значение касательных напряжений
определяется полуразностью экстремальных
значений главных напряжений:
аксимальное
значение касательных напряжений
определяется полуразностью экстремальных
значений главных напряжений:
14.Выражение копмонентов деформаций через перемещения(состояние Коши)
________________________________________________________________________________
Сопротивление материалов и теория упругости перемещения отдельных точек тела связывают с его деформациями.
Причем, в теории упругости решается задача получения в общей форме геометрических зависимостей деформаций от напряжений в нагруженном теле.
При деформации, точки тела перемещаются. Например, точка А (x, y, z) переместится в точку в А1, т.е. получит перемещения u, v, w.
К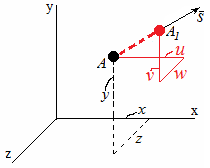
 оординаты
точки А1:
оординаты
точки А1:

Отрезок АА1 есть модуль полного перемещения
Поле напряжений в нагруженном теле является неоднородным, поэтому поле деформаций также будет неоднородным.
Воспользуемся также тем обстоятельством, что даже большие величины напряжений сопровождаются весьма малыми деформациями:
деформации малы по сравнению с размерами тела.
Следовательно, при переходе от точки А к точке А1 величины деформаций бесконечно малых отрезков, параллельных координатным осям, будут изменяться на величину дифференциала.
В ыделим
в теле два отрезка АВ и АС бесконечно
малой длины (dx,
dy)
с прямым углом между ними.
ыделим
в теле два отрезка АВ и АС бесконечно
малой длины (dx,
dy)
с прямым углом между ними.
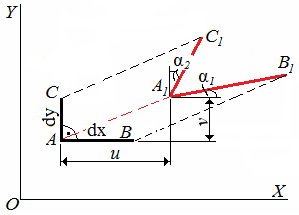
После деформации тела точки А, В, С переместятся в новое положение
Относительная линейная деформация
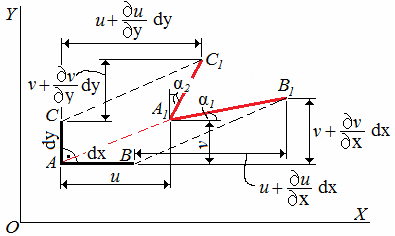

И
 зменение
углов:
зменение
углов:
относительная угловая деформация
О кончательные
выражения для относительных линейных
и угловых деформаций для всех трех
координатных плоскостей называют
соотношениями Коши:
кончательные
выражения для относительных линейных
и угловых деформаций для всех трех
координатных плоскостей называют
соотношениями Коши: