38. Задачи и методы динамического анализа. Показатели кач-ва переходных процессов статич. И астатич. Сар.
Задачи
анализа состоят в оценке при заданных
хар-ках элементов САР, ее устойчивости
и показателей кач-ва переходного
процесса, а также соответствие системы
предъявляемым к ней требованиям.
Требования к САР определяются условиями
надежности и экономичности эксплуатации
регулируемых объектов при часто
встречающихся и наиболее тяжелых для
системы возмущениях. Для оценки
показателей кач-ва процесса САР
необходимо построить его или получить
экспериментально. Прямые методы анализа
кач-ва позволяют построить процесс при
заданном возмущении, т.е. решить
неоднородное линейное диф ур-ние с пост
коэф. Классические способы решения
таких ур-ний даже не высокого порядка
трудоемки.

39. Критерий Найквиста. Запасы устойчивости.
Критерий
позволяет оценить устойчивость замкнутой
системы по АФЧХ той же системы в
разомкнутом состоянии.
![]() В
общем случае критерий устойчивости
Найквиста формулируется так: замкнутая
САР устойчива если разность между
числами положительных и отрицательных
переходов отрезка действительной оси
(-∞; - 1) АФЧХ разомкнутой системы m/2, где
m- число корней характеристического
ур-ния разомкнутой системы, лежащих в
правой полуплоскости. Положительным
считается переход характеристики при
возрастании ώ из верхней полуплоскости
в нижнюю, отрицательным – переход из
нижней полуплоскости в верхнюю.
Большинство судовых САР в разомкнутом
состоянии устойчивы. В этом случае
критерий может быть сформулирован так:
замкнутая система САР устойчива если
изменение ώ от 0 до ∞ АФЧХ разомкнутой
системы не охватывает точку (-1; 0).
В
общем случае критерий устойчивости
Найквиста формулируется так: замкнутая
САР устойчива если разность между
числами положительных и отрицательных
переходов отрезка действительной оси
(-∞; - 1) АФЧХ разомкнутой системы m/2, где
m- число корней характеристического
ур-ния разомкнутой системы, лежащих в
правой полуплоскости. Положительным
считается переход характеристики при
возрастании ώ из верхней полуплоскости
в нижнюю, отрицательным – переход из
нижней полуплоскости в верхнюю.
Большинство судовых САР в разомкнутом
состоянии устойчивы. В этом случае
критерий может быть сформулирован так:
замкнутая система САР устойчива если
изменение ώ от 0 до ∞ АФЧХ разомкнутой
системы не охватывает точку (-1; 0).
40. Метод настройки сар. Их достоинства и недостатки. Область применения.
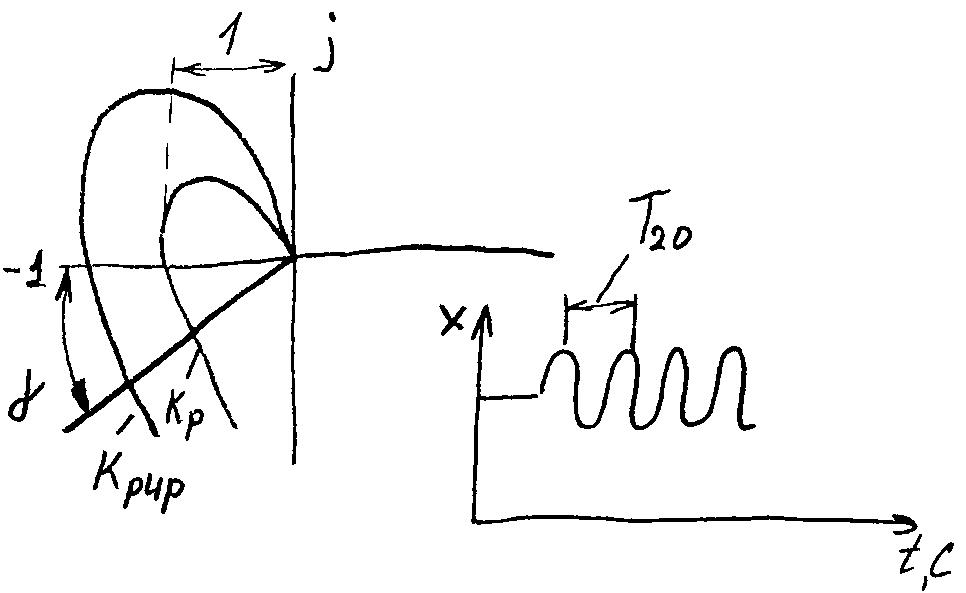
1-по незатухающим колебаниям – этот метод применим для объектов регулирования допускающим работу при колебаниях регулируемой величины с пост амплитудой.сущность- вывод САР на границе устойчивости.не зависимо от реализуемого закона регулирования регулятор вкл по схеме с минимальным значением коэф пропорциональности и постепенно его увеличивают до критического значеня при кот в САР возникают незатучающие колебания. Это указ на то что афчх разомкнутой системы при критической частоте соответствующей незатухающим колебаниям проходит через точку (-1; j0). При настройки необходимо добиться того коэф пропорциональности чтобы система имела запас устойчивости по амплитуде и фазе. Данный метод применяется как для устойчивых так и для нейтральных объектов регулирования.
2-алгоритмический метод наладки. При использовании данного метода эксперимент проводится всей системой регулирования. Полученные настроечные пар-ры обеспеч не оптимальный а допустимые показатели кач-ва работы САР. Порядок настройки: 1- ОР выводится на нагрузку 50% 2- устан минимальный коэф пропорциональности 3- откл дифференцирование и интегрирование. Проверяют что САР на установившемся режиме 4- изменяют нагрузку на 10-15% 5- устан начальную нагрузку объекта и САР выводится на установившийся режим 6- постепенно увел коэф пропорциональности и повторяется изменение нагрузки ОР 7- это повторяем до тех пор пока переходной процесс по регулируемой величине будет иметь заметное перерегулирование.
3-
по величине запаздывания. В замкнутой
системе можно использовать для систем
с ПИ и ПИД регуляторами. Метод основан
на том что в системах облад запаздыванием
предельный период колебаний опред
практически единственным пар-ром-
запаздыванием. частота колебаний
![]()