

36. Понятие устойчивости сар. Математическая оценка устойчивости.
Установившееся состояние САР в зависимости от св-тв объекта и регулятора, а также настройки последнего может быть устойчивым и неустойчивым. Если после нанесения и снятия возмущения система САР возвращается к исходному установившемуся состоянию или близкому к нему то она наз устойчивой. Оценка устойчивости линейной системы возможна путем нахождения общего решения ее линейного однородного диф. уравнения описывающего свободное движение системы. Изменение регулируемой величины во времени опред отдельными слагаемыми. Условия устойчивости можно опред так: линейная система устойчива если все корни характеристического Ур-ния располагаются в левой комплексной полуплоскости. Реальная система должна иметь запас устойчивости определяемый степенью устойчивости кот = абсолютному значению минимальной величины действительной части корня геометрически представляющей расстояние от мнимой оси до ближайшего корня характеризуя удаленность системы от границы устойчивости.
Критерий Вишнеградского
![]()
![]() где
–
где
–
![]()
Систем устойчива если A>0 В>0 и A*B>1

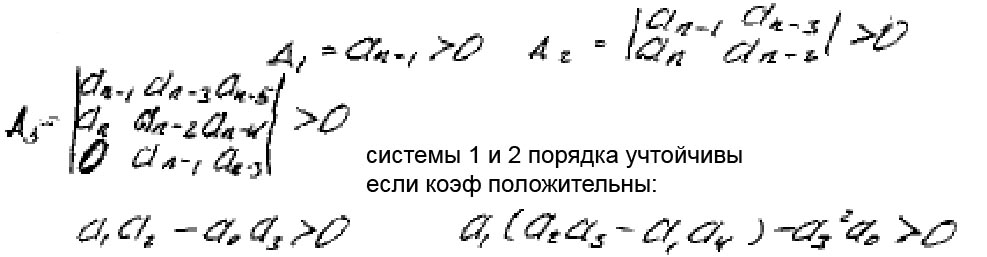
Гурвица
37. Влияние параметров звеньев сар на ее устойчивость
Требование устойчивости явл условием необходимым достаточность устанавливается из анализа динамики устойчивой системы. Переходные процессы в САР должны отвечать следующим требованиям определенным конкретным особенностями эксплуатации Наибольший практический интерес представляют такие качественные показатели как точность регулирования в установившемся режиме или его статической или динамической ошибки быстродействия системы и колебательность процесса статическая ошибка определяется двумя составляющими: первая обусловлена действием отдельных звеньев они зависят от сил трения зазоров и так далее, вторая неравномерностью регулирования зависит от нагрузки и структуры САР (законов регулирования значения коэф усиления). Динамика процесса регулирования оценивается несколькими показателями: 1 – сатическая ошибка, степень неравномерности и зона не чувствительности; 2 – величиной первого отклонения ΔУmax. 3 - Длительностью времени to 4 – декрементом затухания – отношение последующей амплитуды колебания к предведущей. Автоколебания в системе регулирования возникают в следствии того что на постоянной нагрузке ОР регулятор устанавливает значение регулирующего воздействия с погрешностью по отношению к значению нагрузки ОР. ПРИМЕР: в этом случае может служить то что в системе регулирования давления пара в котле расход топлива в котле будет не соответствовать расходу пара из котла. В регулятор с инерциальной составляющей в законе регулирования (ПИ и ПИД) обязательно будут возникать автоколебания как при регулировании устойчивых и нейтральных объектов. Такие автоколебания должны возникать в системе регулирования нейтрального объекта при любом законе регулирования. В системе регулирования с П и ПД регулятором и устойчивым объектом регулирования возникновение автоколебания на явл обязательным а зависит от коэф пропорциональности.
