

27. Интегральное регулирование. Уравнение, параметры настройки.
Интегральные
регуляторы – в которых регулирующее
воздействие пропорционально интегралу
отклонения регулируемой величины. При
использовании таких регуляторов
остаточная неравномерность отсутствует.
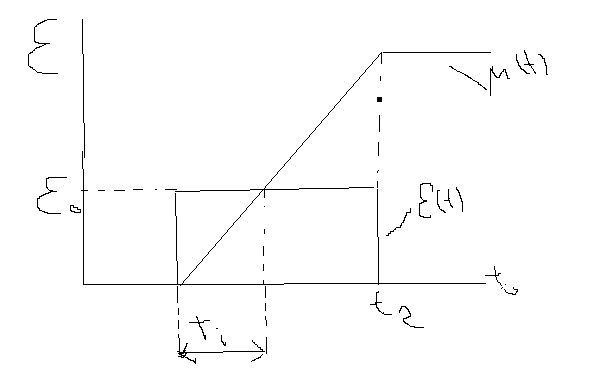
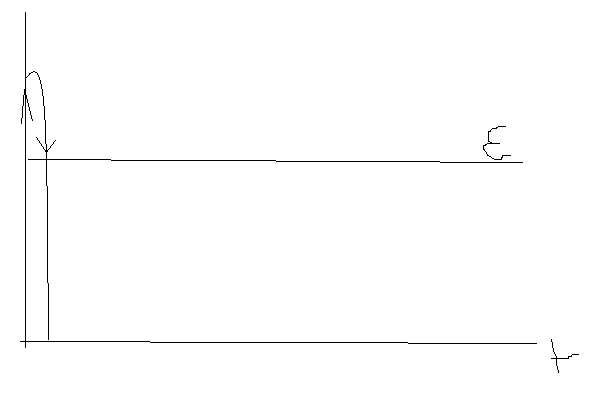
Настроечный параметр Ти – время в
течении которого происходит по времени
такое же изменение выходной величины
что и входной. Примером одноимпульсного
интегрального регулятора с усилителем
может служить гидравлический регулятор
давления воды в трубопроводе перед
питательным клапаном котла. Динамические
свойства регулятора определяются
временем разгона которое можно изменить
с помощью параметра – времени
исполнительного механизма. Уравнение
![]() μ-выходная
величина. Ti-
постоянная времени интегрирования
μ-выходная
величина. Ti-
постоянная времени интегрирования
28. Пропорционально интегральное регулирование. Уравнение.
Пропорционально
интегральное регулирование осуществляется
ПИ регулятором. Регулирование такими
регуляторами – статическое. Динамические
свойства регуляторов определяют коэф.
усиления обратной связи, временем
изодрома и временем исполнительного
механизма. Обычно регуляторы имеют
устройство с помощью которых можно
изменить эти параметры в эксплуатационных
условиях с целью получения устойчивости
и необходимы показателей качества
регулирования. ПИ регуляторы находят
применение при автоматизации элементов
СЭУ, когда САР должна иметь характеристику
регулирования с нулевой неравномерностью,
а применение И регуляторов не обеспечивает
устойчивое регулирование. Уравнеие
регулятора-
![]() -
Т1, Т2 – постоянные времени Кр – кооф
усиления регулятора
-
Т1, Т2 – постоянные времени Кр – кооф
усиления регулятора
29. Регулирование по производной. Уравнение, параметры настройки.
Регулирование
по производной от отклонения в чистом
виде не нашло применения. Регулирование
по производной используется в системе
стабилизации судна при качке.![]()
 Регулирование по производной от
отклонения в чистом виде не нашло
применения. Регулирование по производной
применяется в системе стабилизации
судна при качке
Регулирование по производной от
отклонения в чистом виде не нашло
применения. Регулирование по производной
применяется в системе стабилизации
судна при качке

![]() -
уравнение регулятора
-
уравнение регулятора
30. Пропорционально интегральное дифференциальное регулирование. Уравнение, , параметры настройки.
Пропорционально интегральное дифференциальное регулирование (ПИД регулятор). Назначение контроль за отклонением регулируемой величины обеспечение астатической характеристики регулирования и быстродействия.


Настроечные параметры: Кп – коэф усиления, Тп – постоянная времени дифференцирования, Ти – постоянная времени интегрирования
Закон регулирования
![]()
![]()
31. Датчики, назначение, состав, параметры настройки.
Датчики положения ИМ формируют сигналы ОС в электрических следящих системах. Виды индуктивные и импульсные датчики. Индуктивный – преобразует угол поворота механизма выходного вала редуктора ИМ в сигнал постоянного тока. Импульсный – представляет собой генератор импульсов, число импульсов пропорционально углу поворота ротора эл двигателя Состав импульсных датчиков – два генератора импульсов, статор ротор.
