

21.Многоемкостный устойчивый объект.Пример.Структурная схема.Передаточная ф-ция.Расчет коэф.
Объект без запаздывания. Примером такой системы может быть паровой котел у кот инерционность топки хар-ся пост времени Т1, инерционность пароводяного объема – постоянная Т2,возмущающее воздействие явл изменение расхода пара потребителю,а регулируемой величиной давление пара.
 --передаточная
функция системы
--передаточная
функция системы
22. Многоемкостный нейтральный объект. Пример.Структурная схема.Передаточная ф-ция.Расчет коэф
Простейшим примером многоемкостного объекта может служить цепочка одноемкостных звеньев,соединенных последовательно. Если передаточные ф-ции звеньев имеют вид:……
То передаточная ф-ция цепочки последовательно соединенных звеньев:………… знаменатель этой передаточной ф-ции приравненный нулю есть характеристическая Ур-ние системы. Корни Ур-ния : W1=-1/T1 W2=-1/T2 W3=-1/T3. это обратные величины постоянных времени в каждой из емкостей.чем больше постоянная времени в конкретной емкости, тем меньше сответствующии корень Ур-ния,тем медленнее протекает переходной процесс в этой емкости.
24. Принцип управления по отклонению и по возмущению. Примеры.
Регулирование по отклонению осущ. В замкнутых САР. В таких САР регуляторы стремятся устранить отклонение регулируемой величины от заданного значения независимо от типа возмущения вызвавшего отклонение. ПРИМЕР: регулятор температуры топлива. В разомкнутых САР осуществляется регулирование по возмущению. Такие регуляторы получая информацию по заданному значению регулируемой величины и по нагрузке в соответствии с умением последней воздействуют на регулирующий орган. Достоинства: быстродействие регулятора.
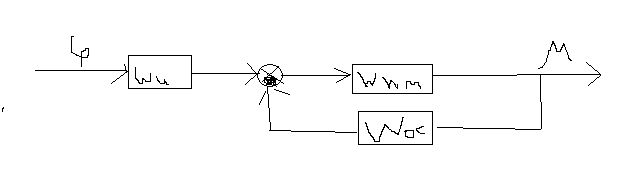
25. Комбинированный принцип управления, пример
Объединяют в одну систему замкнутые по отношению и разомкнутые.
 Одновременное
использование информации по состоянию
объекта и нагрузки позволяет преимущество
обоих видов регулирования по конструкции
становится более стойкой из за
необходимости установки 2х чувствительных
элементов измерения ПРИМЕР: регулятор
температуры топлива.
Одновременное
использование информации по состоянию
объекта и нагрузки позволяет преимущество
обоих видов регулирования по конструкции
становится более стойкой из за
необходимости установки 2х чувствительных
элементов измерения ПРИМЕР: регулятор
температуры топлива.
26. Пропорциональное регулирование. Уравнение, структурная схема, параметры настройки.
Автоматическое
регулирование при котором сигнал
управления пропорционален отклонению
регулируемой величины наз –
пропорциональным. Связь между выходной
и входной величинами регулятора
определяется его уравнением.![]()
 --полная
структурная схема П-регулятора
--полная
структурная схема П-регулятора
35. Определение динамической хар-ки сар. Виды переходных процессов.
Анализ динамики устойчивой системы показывает что переходные процессы САР должны отвечать спец требованиям: определенным конкретным особенностям их эксплуатации. Переходным процессом наз изменение во времени состояния динамической системы с момента приложения возмущения до начала установившегося движения. В частном случае если возмущающее воздействие имеет форму единичного скачка, а система в момент сообщения ей возмущения нах в покое, такой процесс наз переходной ф-цией. Динамика регулирования оценивается несколькими показателями:
1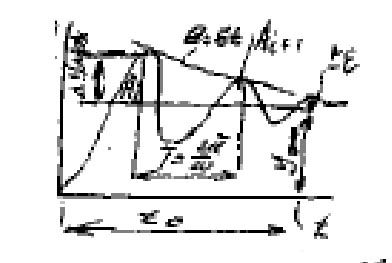 -
статическая ошибка – неравномерностью
(у; ∞)
или степенью неравномерности и зоной
нечувствительности (±ε).
2- величиной 1-го отклонения
ΔУ1мах=У1мах-У∞/У∞.
3- длительностью .t0
– время за кот система приходит к
установившемуся движению. 4- декрементом
затухания – отношением последующей
амплитуды колебания к предыдущей
х=Аi=1/Ai
-
статическая ошибка – неравномерностью
(у; ∞)
или степенью неравномерности и зоной
нечувствительности (±ε).
2- величиной 1-го отклонения
ΔУ1мах=У1мах-У∞/У∞.
3- длительностью .t0
– время за кот система приходит к
установившемуся движению. 4- декрементом
затухания – отношением последующей
амплитуды колебания к предыдущей
х=Аi=1/Ai