

15. Определение колебательного звена, уравнение, примеры.
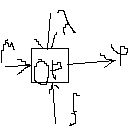
Колебательное звено – такое звено в кот выходная величина при скачкообразном входном воздействии стремится к новому установившемуся значению, совершая относительно него колебания, амплитуда которых затухает по экспонентальному закону.
![]()
Передаточная
функция
![]()
- колебания отсутствуют, коэф затухания =1
- затухающие колебания, коэф затухания =0-1
- автоколебания, коэф затухания = 0
Примером такого звена может служить чувствительный элемент регуляторов частоты вращения турбин – центробежный маятник, входным сигналом кот явл частота вращения, а выходным - перемещение муфты.
16 . Определение дифференцирующего звена, уравнение, пример. Реальное дифф. Звено.
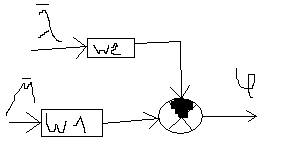
Реальное дифференцирующее звено можно рассматривать как последовательно соединенные 2 звена – дифференцирующие и статическое, поэтому реальное дифференцирующее звено также как и апереодическое звено 2 порядка не явл типовым звеном. Примером реального диф звена явл изодром гидравлических регуляторов ЦНИИ им академика АН Крылова.
![]() .
К коофиц. Пропорциональности
.
К коофиц. Пропорциональности
Реальное
дифференциальное звено:
![]() t-постоянная
времени
t-постоянная
времени
17 . Классификация объектов регулирования. Статические хар-ки. Коэф самовыравнивания.
Классификация:
1 по количеству емкостей:
- безъемкостные
- одноемкостные
- многоемкостные
2 по хар-ру самовыравнивания (саморегулирование):
- устойчивые
- неустойчивые
- нейтральные
3 по значению регулируемой величины в различных точках на установившихся режимах:
- объект со сосредоточенными пар-рами (регулятор уровня)
- с распределенными пар-ми (теплообменник)
Самовыравнивание – способность объекта самостоятельно приходить в новый установившийся параметр после нанесения возмущения. а=∆W/∆H где Н-уровень W- расход жидкости.
Работа САР в статике оценивается по характеристикам регулирования, выражающими связь между регулируемыми величинами и внешней нагрузкой. Ее можно построить если заданы хар-ки элементов составляющих САР.
18.Уравнение одноёмкостного устойчивого объекта . Динамические харктеристики.
![]() z>0
z>0
![]()
![]()
19. Уравнение одноемкостного нейтрального обьекта . Динамические характеристики
 возмущение
накладывается открытием клапана 1
возмущение
накладывается открытием клапана 1
![]()
Z=0 -кооф самовыравнивания
![]()
![]() Ta
=1/k
-время интегрирования
Ta
=1/k
-время интегрирования
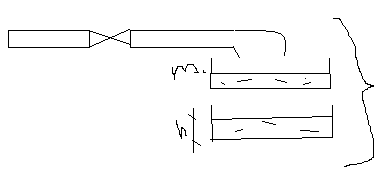
20. Уравнение 2-х емкостного устойчивого и нейтрального объекта.
Вода
из 1-й емкости поступает во 2-ю. хар-р
подвода и отвода воды в каждой емкости
указ на наличие у них самовыравнивания
только на отводе. Изменение уровня 1-й
емкости не влияет на подвод к ней воды,
а изменение уровня во 2-й на перетикание
из емкости в емкость. 2-х емкостный
нейтральный объект-это последовательное
соединение 2-х емкостей отличающихся
от рассмотренных выше тем что отвод из
2-й емкости осущ зубчатым насосом, подача
кот опред частотой вращ и не зависит
от величины подпора. Объект явл реально
интегрирующим звеном т к состоит из
последовательно соединенных звеньев
– апериодического и интегрирующего.
 2-ух
емкостный устойчивый объект-характер
подвода и отвода в каждой емкости
указывает на наличие у них самовыравнивания
на отводе
2-ух
емкостный устойчивый объект-характер
подвода и отвода в каждой емкости
указывает на наличие у них самовыравнивания
на отводе
2-х емкостный нетральный обьект – это последовательное соединение 2-х емкостей где отвод из 2-й емкости осуществляется зубчатым насосом , подача которого опрелеляется только частотой вращения