11. Структурная схема сар. Осн элементы. Передаточная ф-ция разомкнутой сар.
Передаточная ф-ция разомкнутой САР – представляет собой графическое изображение показателей из каких динамических звеньев сост система и как они соединены между собой.
Основные элементы:
- динамические звенья направленного действия с известными передаточными ф-циями. Изображается в виде прямоугольников внутри которых вписываются операторы преобразования сигнала.
- связи обозначаются линиями со стрелкой, указывающей направление передачи сигнала (бывают прямые и обратные).
- сумматоры – через кот складываются или вычетаются воздействия.
- узлы разветвления – в кот воздействия разветвляются на 2 и более направлений.
![]() -
инерционное звено, К1- коофициент
пропорциональности
-
инерционное звено, К1- коофициент
пропорциональности
![]() -
идеальное интегрирующее звено .
W3=K3
– усилительное звено
-
идеальное интегрирующее звено .
W3=K3
– усилительное звено
![]() -
реальное инерциональное звено. W5=T5p
– реальное дифференциальное звено
-
реальное инерциональное звено. W5=T5p
– реальное дифференциальное звено
![]()
Пусть имеется схема САР замкнутая
Передаточная
функция
![]()
12. Передаточные ф-ции замкнутой сар по заданию и нагрузке,примеры.
N(p)- оператор воздействия САР-по нему можно определить как реагирует система на воздействие показателей систем. D(p)-собственный оператор САР-позволяет определить систему на устойчивость. В замкнутых САР на вход регулятора поступает задающее воздействие и выходная величина объекта явл регулируемой величиной. Регулятор кот обеспеч регулирующее воздействие,образует в таких схемах обратную связь,потому замкнутые САР наз системами с обратной связью.

13. Типовые звенья сар. Определение апериодического звена.
Типовое звено – это элемент системы обладающий опред динамическими св-вами:
- тепловой элемент
- безинерциальное звено
- апереодическое звено
- интегрирующее звено
- колебательное звено
- дифференцирующее звено
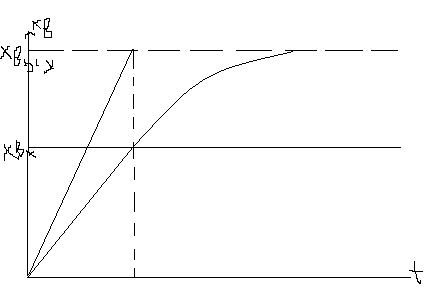
Апереодическое звено – явл простейшим инерциальным звеном. Апереодическое звено хар-ся наличием емкости, в кот может аккумулироваться материя или энергия, и сопротивление на ее подводе и отводе. Примерами явл задросселированные камеры в пневматических регуляторах, манометрический термометр. Переходная хар-ка явл экспонентой, проходящей через начало координат и асимптотический приблежающийся к значению выходной величины в новом равновесном состоянии. С увеличение коэф усиления звена увел относительное изменение выходной величины при одинаковом возмущении
![]()
![]()
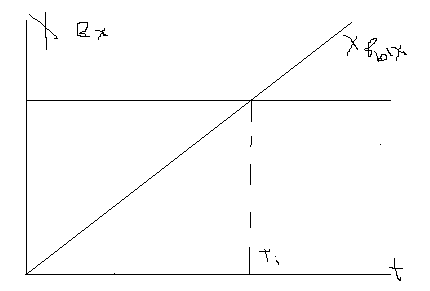
14 . Определение интегрирующего звена, уравнение, примеры.
Интегрирующее звено – не сущ однозначной зависимости между входной и выходной величиной. Это звено у кот выходной сигнал интеграл входного. Если текущее время = времени интегрирования то выходной сигнал равен входному. Время интегрирования – это время за кот выходной сигнал изменился на величину входного сигнала. Пример : гидравлический сервомотор двухстороннего действия имеющий входную величину – перепад давления жидкости поступающий в его цилиндр, а выходную – перемещение поршня. Если t=Ta то у=1, т.е. время разгона – это фактическое время в теч которого выходная величина достигнет значения, равного ступенчатому изменению входной величины.
![]()