

2.16. Принципы определения местоположения пользователя в
спутниковой системе навигации
Рассмотрим принцип определения местоположения (позиционирования) пользователя в спутниковой системе навигации на примере GPS, с учетом ее более массового применения, по сравнению с GLONASS.
Определение навигационных параметров может производиться в двух режимах – 2D (двухмерном) и 3D (трехмерном - пространственном). В режиме 2D устанавливается широта и долгота (высота считается известной); для этого достаточно присутствия в зоне радиовидимости трех спутников. Время определения координат в режиме 2D обычно не превышает 2 мин. Для определения пространственных координат потребителя (режим 3D) требуется, чтобы в зоне радиовидимости находилось не менее 4-х спутников. Для проверки корректности полученных результатов необходимо использовать пять спутников, для проверки, какой из спутников дает неправильный результат измерений, требуется шесть спутников.
Теория определения местоположения пользователя достаточно проста. В основу работы GPS положена спутниковая дальнометрия. Это означает, что мы определяем координаты занимаемой нами позиции путем измерения дальностей, относительной этой позиции, нескольких спутников. Проблема требует решения в деталях. Спутники вращаются вокруг Земли со скоростями порядка 4 км/с. Земля вследствие наклона относительно плоскости орбиты как бы дрейфует, само транспортное средство, например, воздушное судно, тоже движется, и с немалой скоростью. Поэтому для точного позиционирования посылаемые спутником, в определенное время, сигналы, должны восприниматься пользователем, знающим это точное время, что позволит начать соответствующие измерения в требуемый момент времени.
Синхронизация со временем пользователя достигается с помощью индивидуального, называемого также псевдослучайным, кода, который передается каждым спутником и обеспечивает его идентификацию. Эти коды заранее известны и также, в свою очередь генерируются приемником потребителя. Псевдодальности рассчитываются по следующей схеме:
- спутник излучает псевдослучайный код, повторяющейся через определенный интервал времени;
- приемник пользователя воспроизводит коды спутников, хранящиеся в его памяти;
-
Рис.
34. Иллюстрация задержки принятия сигнала
со спутника
приемником.
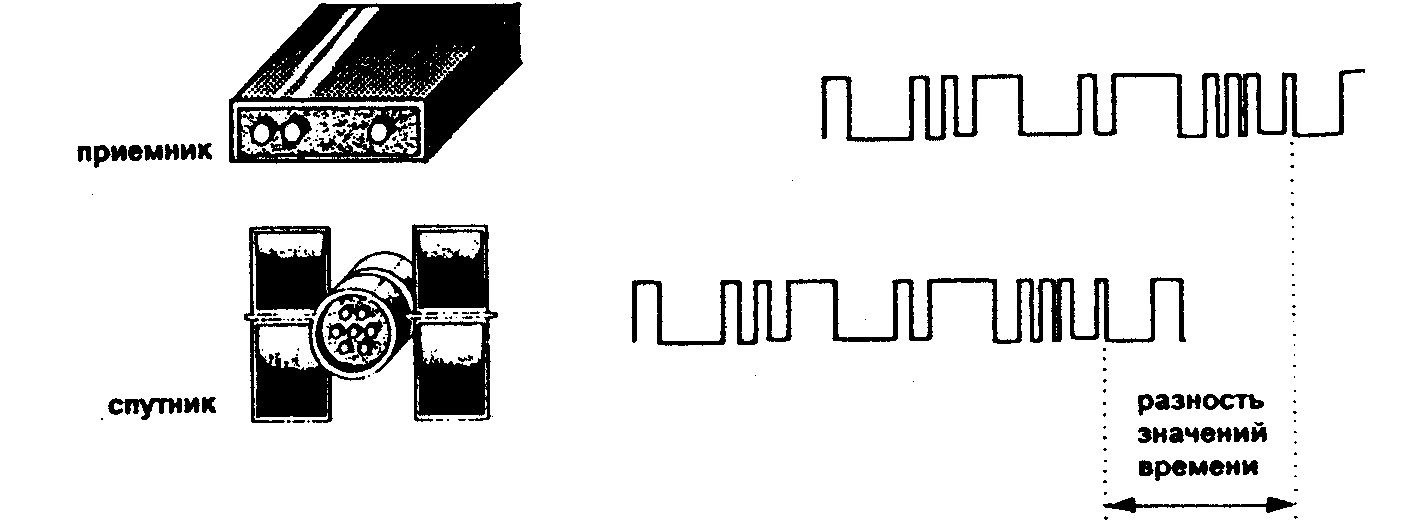
- величина временной задержки сигнала определяется сопоставлением кодов сигналов излучаемых спутником и генерируемых приемным устройством, путем временного сдвига до их совпадения. Временной сдвиг определяется по часам приемника. При совпадении кодов мощность, выходного сигнала приемника резко возрастает, рис. 33, это означает, что сигналы коды спутника и приемника синхронизированы по времени и время передаваемое часами спутника зафиксировано приемником;
- теперь, по задержке принятия сигнала со спутника приемником, определяется разность значений времени, рис. 34, и по нему дальность до соответствующего спутника.
Итак, резюмируя вышесказанное, псевдодальности до спутников рассчитываются по временным задержкам прохождения сигналов синхронизированных между собой навигационного космического аппарата и приемника потребителя. Задержки в прохождении сигнала со спутника измеряются сопоставлением принятых псевдослучайных кодов и генерируемых в приемнике копий этих кодов, с учетом известных моментов излучений сигналов навигационного космического аппарата.
Основными источниками ошибок, на примере системы GPS, влияющими на точность навигационных вычислений, являются следующие.
Погрешности, обусловленные режимом селективного доступа (S/A). Реализуя этот режим, поставщик услуг GPS (Министерство обороны США) намеренно снижало точность определения местонахождения для гражданских потребителей. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью загрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратической ошибки из-за влияния этого фактора составляет примерно 30 м. (как уже говорилось ранее, США отменили загрубление навигационных изменений).
Рис.
34. Иллюстрация задержки принятия сигнала
со спутника
приемником.
Погрешности, обусловленные распространением радиоволн в тропосфере. Возникают при прохождении радиоволн через нижние слои атмосферы. Значения погрешностей этого вида при использовании сигналов с С/А-кодом не превышают 30 м.
Эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта КА. Значение погрешности обычно не больше 3 м.
Погрешность ухода шкалы времени спутника. Обусловлена расхождением шкал времени различных спутников. Устраняется с помощью наземных станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
Погрешность определения расстояния до спутника. Данный показатель является статистическим, он вычисляется для конкретного спутника и заданного интервала времени прохождения сигнала со спутника до навигационного приемника. Ошибка не коррелирована с другими видами погрешностей. Ее величина обычно не превышает 10 м.