

5.5. Преобразовательные элементы
Корректирующие устройства систем регулирования по отклонению осуществляют преобразование сигнала управления. С этой целью их составляют из элементов, которые удобно называть преобразовательными. В системах комбинированного регулирования основной частью дополнительных цепей (компенсирующей и форсирующей) также являются преобразовательные элементы. Используются электрические, механические, гидравлические, пневматические и иные преобразовательные элементы, но наиболее широкое применение нашли электрические элементы. Рассмотрим основные из них.
Пассивные четырехполюсники постоянного тока. Это электрические цепи из сопротивлений, конденсаторов и индуктивностей. Общая схема пассивного
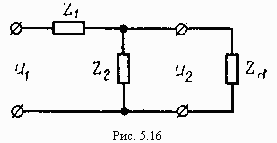
Здесь u 1 и u 2 - соответственно входное и выходное напряжения постоянного тока; Z 1 =R 1 +1/C 1 s+L 1 s и Z 2 =R 2 +1/C 2 s+L 2 s - импедансы чегырехполюсника; R i ,C i и L i - соответственно активные сопротивления, емкости и индуктивности; Z н - импеданс нагрузки. Если напряжение u 2 приложено к нагрузке с бесконечно большим импедансом Z н , то передаточная функция пассивного четырехполюсника
W П =Z 2 / (Z 1 +Z 2 ) |
(5.29) |
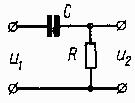
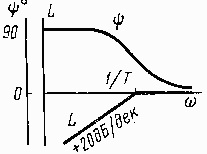
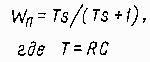
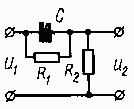
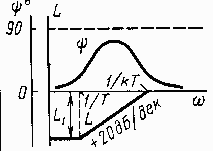
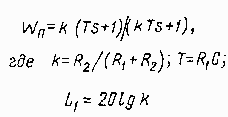
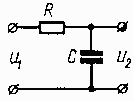
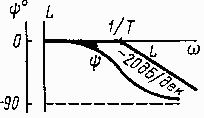
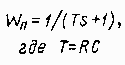
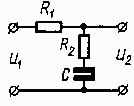
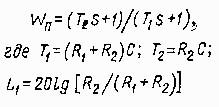
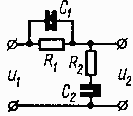
Пассивные четырехполюсники постоянного тока обладают существенными достоинствами. Варьируя вид импедансов Z 1 и Z 2 и значения ; R i , C i и L i можно получить неограниченное количество различных четырехполюсников, различных передаточных функций W П . Стоимость пассивных четырехполюсников низкая, а стабильность параметров достаточно высокая. Этими достоинствами объясняется весьма широкое использование пассивных четырехполюсников в системах автоматического регулирования, у которых сигналом управления является напряжение постоянного тока. Основной недостаток пассивных четырехполюсников в том, что они ослабляют сигнал. Кроме того, при конечном значении импеданса Z н нагрузки преобразование сигнала отклоняется от желаемого, соответствующего виду передаточной функции W П составленной по (5.29) . Если импеданс Z н сопоставим с Z 2 , то передаточная функция W П четырехполюсника должна составляться с учетом Z н . Однако в этом случае уже труднее получить передаточную функцию желаемого вида. Наиболее характерные схемы пассивных четырехполюсников постоянного тока приведены в табл. 5.1. Там же даны выражения их передаточных функций и показаны логарифмические частотные характеристики. Принято разделять четырехполюсники на дифференцирующие, интегрирующие и интегро-дифференцирующие. Дифференцирующие четырехполюсники (схемы 1, 2 в табл. 5.1) в определенном диапазоне частот дифференцируют сигнал и создают положительный сдвиг по фазе. Интегрирующие четырехполюсники (схемы 3, 4 в табл. 5.1) в некотором диапазоне частот обеспечивают интегрирование сигнала, создают отрицательный сдвиг по фазе. Интегро-дифференцирующие четырехполюсники (схема 5 в табл. 5.1) в одном диапазоне частот дифференцируют сигнал, а в другом диапазоне его интегрируют.
Иногда оказывается целесообразным или необходимым соединить два пассивных четырехполюсника последовательно (рис. 5.17, а) . Передаточную функцию такого соединения можно определять по формуле
Ц Э =W G1 W П2 |
(5.30) |
только при условии, что сумма импендансов Z 12 +Z 22 второго четырехполюсника значительно, по крайней мере на порядок, больше импеданса Z 21 первого четырехполюсника.
Таблица 5.1 |
|||
№ |
Электрическая схема |
Логарифмические частотные характеристики |
Передаточная функция |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
4 |
|
|
|
5 |
|
|
|

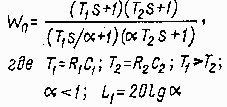
Чаще пассивные четырехполюсники соединяют последовательно через разделительный усилитель (рис. 5.17,б) . Если входное сопротивление усилителя не влияет на передаточную функцию W G1 первого четырехполюсника, то передаточная функция соединения
W 3 =W G1 k y W П2 |
(5.31) |
где k y - передаточный коэффициент усилителя. Преимущество второй схемы еще и в том, что разделительный усилитель компенсирует понижение уровня сигнала, вызываемое пассивными четырехполюсниками. Активные четырехполюсники постоянного тока. Общая схема такого четырехполюсника представлена на рис. 5.18. Четырехполюсник состоит из входного импеданса Z и усилителя постоянного тока с отрицательной обратной cвязью, которая создается импедансом Zo .
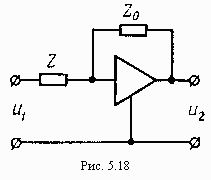
В активных четырехполюсниках используются операционные усилители с весьма большим передаточным коэффициентом ( k y =50000 и более) . Поэтому передаточная функция четырехполюсника с достаточной точностью равна отношению импедансов
W a =-Z 0 /Z. |
(5.32) |
Знак минус указывает на то , что знак напряжения u 2 противоположен знаку u 1 (фаза сигнала изменяется на 180°) . Активные четырехполюсники удается выполнять так, что они осуществляют почти идеальное дифференцирование или интегрирование сигнала, тем более в ограниченной полосе частот. Передаточный коэффициент четырехполюсника может быть значительным. Легко осуществить суммирование нескольких сигналов на входе. Все это весьма существенные достоинства активных четырехполюсников. Однако они значительно сложнее и дороже пассивных четырехполюсников. При составлении схемы активного четырехполюсника необходимо проверять его устойчивость, так как он представляет собой замкнутую систему - в нем имеется обратная связь.
В табл. 5.2 приведены простейшие схемы активных четырехполюсников, их передаточные функции и логарифмические частотные характеристики.
Таблица 5.2 |
|||
№ |
Электрическая схема |
Логарифмические частотные характеристики |
Передаточная функция |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
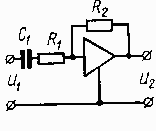
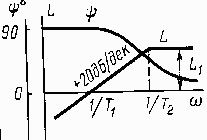
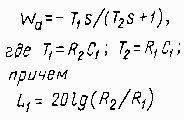
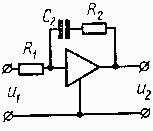
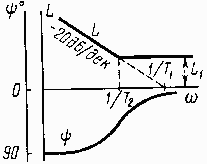

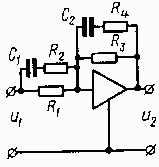
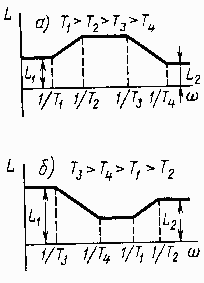

Схема 1 является дифференцирующей, при R 1 =0 ее передаточная функция принимает следующий вид: W a =-T 1 s . . Схема 2- интегрирующая, при R 2 ее передаточная функция W a =-1/ (T 1 s) . Схема 3 интегро-дифференцирующая. Варьируя вид импедансов Z и Zo и параметры их элементов, можно получить активные четырехполюсники с весьма разнообразными, значительно более сложными передаточными функциями.
Дифференцирующий трансформатор.
Распространенным преобразовательным элементом является трансформатор, обеспечивающий дифференцирование сигнала постоянного тока. Его схема и ЛАХЧ приведена на рис. 5.19.
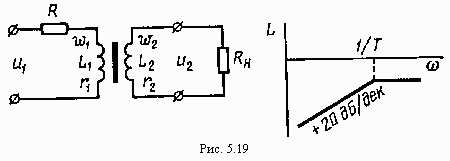
Передаточная функция равна
W T = k T T 1 s/ (Ts+1) |
(5.33) |
где k T = 1 / 2 - коэффициент трансформации; T 1 =L 1 ( 1 +R 1 ) ; T 2 =L 2 ( 2 +R 2 ) -постоянные времени первичной и вторичной обмоток;
T=T 1 +T 2 ; =R H / ( H +R H )
Дифференцирующий трансформатор позволяет избежать гальванической связи между цепями входного и выходного сигналов, что иногда совершенно необходимо. Его часто используют в виде параллельного корректирующего устройства. При этом в цепь вторичной обмотки может быть включен необходимый пассивный четырехполюсник.