

3) Теория графов.
Теория графов предоставляет словарь для обозначения многих особенностей социальных структур, а также набор простых концепций, с помощью которых можно эти особенности охарактеризовать качественно и оценить количественно. Используя теоремы о свойствах графов, можно определять свойства социальных структур
Отношения между акторами могут быть как ненаправленными (например, «жить по соседству»), так и направленными (например, импорт товара из одной страны в другую). Соответственно для анализа первых применяются ненаправленные, или неориентированные, графы, а для анализа последних — направленные, или ориентированные.
Неориентированные графы: основные понятия
Граф G= (N,Z) — это совокупность двух конечных множеств: множества точек N= {n ,, ...,ng}, которые называются вершинами, и множества пар вершин Z= {l1,...,lz}, которые называются ребрами.
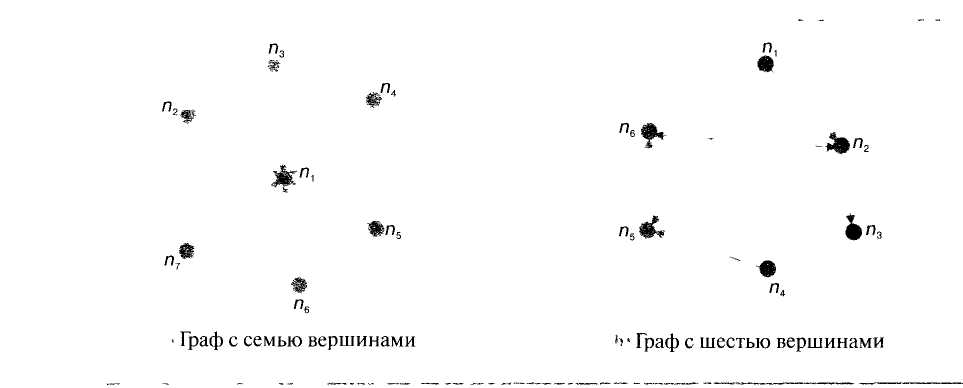
Граф изображается точками на плоскости и линиями 1к = {пр п), соединяющими эти точки. На рис. 3.6а показан граф, который имеет пять вершин и шесть ребер, а на рис. 3.6b — граф, который имеет четыре вершины и четыре ребра.
Ребра, имеющие одинаковые концевые вершины, называются параллельными. Ребро, концевые вершины которого совпадают, называется петлей. На рис. 3.6а /4 и /5 — параллельные ребра, а /2 — петля. Вершина и ребро называются инцидентными друг другу, если вершина является для этого ребра концевой точкой. На рис. 3.6а вершина п3 и ребро 1Л инцидентны друг другу.
Примеры графа
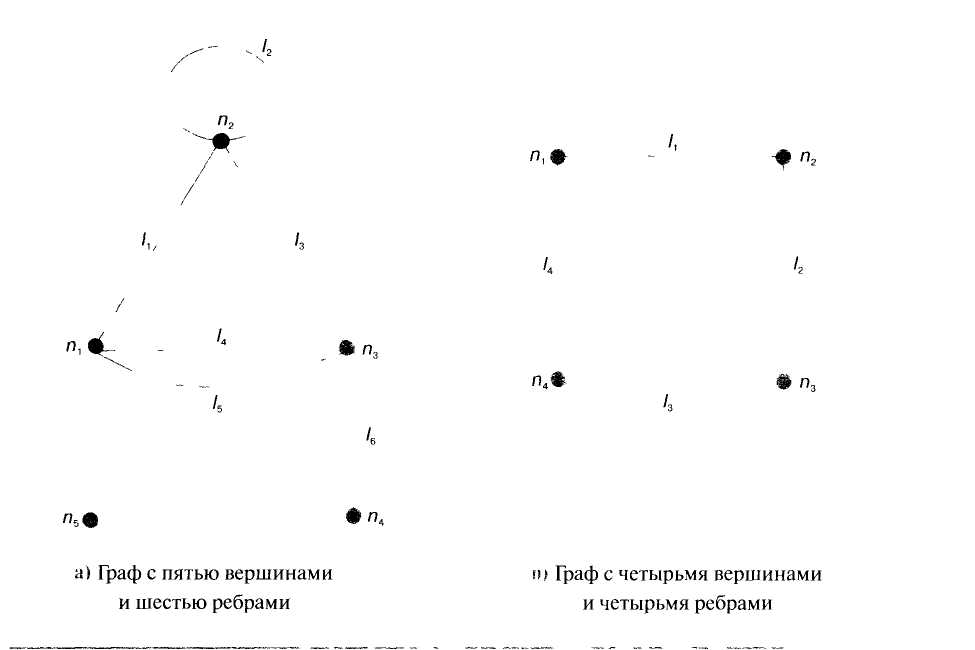
Две вершины, являющиеся концевыми для некоторого ребра, называются смежными вершинами. Два ребра, инцидентные одной и той же вершине, называются смежными ребрами. На рис. 3.6а n1, п2 — смежные вершины, а l1,, l4 — смежные ребра.
Степень вершины
Под степенью п-й вершины d(n) понимается число ребер, инцидентных этой вершине. Вершина степени 1 называется висячей. Вершина степени 0 называется изолированной. На рис. 3.6а степень «,-й вершины d(nt) = 3, «4 — висячая вершина, п5 — изолированная.
В некоторых случаях важно определить среднюю степень вершин d для совокупности всех вершин графа. Для этого используют статистику:
где L — общее число ребер графа,
g — общее число вершин графа
Граф G называется полным, если любые две его вершины соединены ребром и он не содержит параллельных ребер
Дополнением графа G называется граф с теми же вершинами, что и граф G, и содержащий только те ребра, которые нужно добавить к графу G, чтобы получился полный граф.
Циклом называется путь, начальная и конечная вершины которого совпадают. На рис. 3.6а ребра (l1, l3, l4) образуют цикл.
Маршрутом между вершинами пi и пj графе называется последовательность ребер, ведущая от некоторой начальной вершины п1 к конечной вершине п. Путем называется маршрут, не содержащий циклов. Дистанцией между двумя ребрами называется кратчайший путь между ними.
Связность графа
Граф G называется связным, если для любых двух его вершин существует путь, их соединяющий. В противном случае граф G называется несвязным. На рис. 3.8 представлен несвязный граф
Несвязный граф
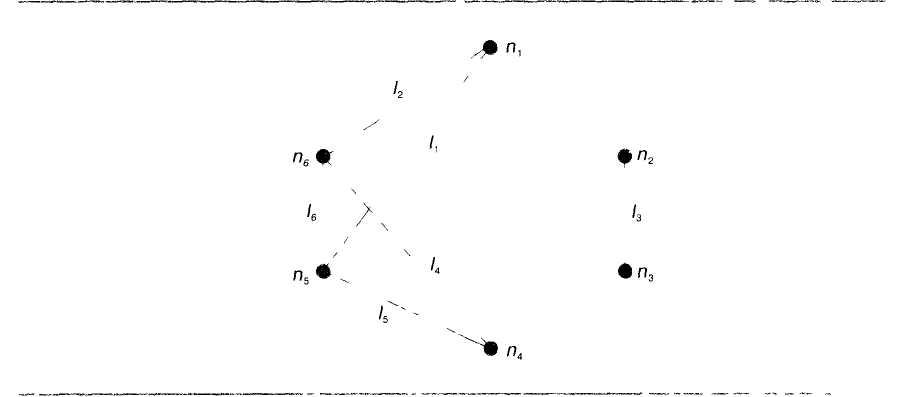
Любой несвязный граф является совокупностью таких связных графов, которые обладают следующим свойством: никакая вершина одного из них не связана путем ни с какой вершиной другого. Каждый из этих графов называется компонентой графа G. В данном примере граф состоит из двух связных компонентов.
Ребро а называется мостом графа G, если граф, получившийся из G после удаления ребра а (такой граф обозначается G\ а), содержит больше компонент, чем граф G. Ребро а графа G является мостом тогда и только тогда, когда а не принадлежит ни одному циклу.
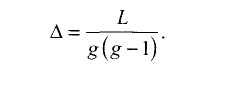
Плотность графа характеризуется коэффициентом плотности А — отношением числа ребер (L) в анализируемом графе к числу ребер в полном графе с тем же числом вершин (g):
Коэффициент плотности варьируется в промежутке от 0 до 1, 0 ≤ Δ ≤ 1. Единичная плотность соответствует полному графу, нулевая — графу, в котором все вершины изолированные.
Частным случаем графов являются деревья. Они характеризуются тем, что содержат минимальное число ребер, необходимое для связности.
При этом
любое ребро дерева представляет собой мост,
l = g-1;
существует только один путь между любыми двумя вершинами.
Ориентированные графы: основные понятия
Если рассматривается множество упорядоченных пар 1к = (ni, пj) из множества точек N={n1 ., пg }, и на каждом ребре из множества Z= { l1,...,lz } задается направление, то граф Gd = (N,Z) называется ориентированным.. Если же на каждом ребре из множества Z= {l1,...,lz } направление не задается, то граф G = (N, Z) называется неориентированным графом, или просто графом.
Примеры ориентированного графа
В ориентированном графе для каждой вершины различаются входящие и исходящие ребра. Поэтому для характеристики отношений, связанных с конкретной вершиной, используют два показателя:
• степень захода dm, которая равна числу ребер, входящих в вершину; и
• степень исхода doul, которая равна числу ребер, исходящих из вершины.
Плотность ориентированного графа характеризуется коэффициентом плотности Δ:
Матричное представление графов
Матрицы — альтернативная форма представления и суммирования информации о социальных сетях. Такой способ в ряде случаев удобнее, чем графический.
Рассмотрим квадратную матрицу Х размерности пхп, где п — количество акторов в группе. Зададим элементы этой матрицы следующим образом:
х = 1, если между акторами i и j существует связь,
xv = 0, если между акторами i и j связь отсутствует.
Данная матрица содержит в себе полную информацию о связях акторов в группе. Так, матрица, описывающая граф на рис. 3.10b, имеет вид
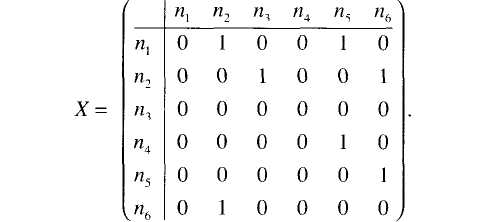
Заметим, что для ненаправленного графа матрица симметрична.
С помощью матричного представления графов можно, пользуясь простейшими операциями матричной алгебры, определять важные свойства этих графов.