

ОСНОВЫ ТЕОРИИ КОЛЕБАНИЙ:
Амплитуда и фаза вынужденных колебаний.
Амплитуда — максимальное отклонение колеблющейся величины от положения равновесия.
Фаза колебаний — определяет смещение в любой момент времени, то есть определяет состояние колебательной системы.
Амплитуду и начальную фаза колебания.
 (3)
(3)
![]() .
(4)
.
(4)
Величина ![]() называется
коэффициентом затухания, она определяется
силой сопротивления среды и пропорциональна
ее.
называется
коэффициентом затухания, она определяется
силой сопротивления среды и пропорциональна
ее.
Амплитуда вынужденных колебаний зависит от амплитуды и вынуждающей силы и коэффициента затухания, и от того, насколько сильно эта частота отличается от собственной частоты.
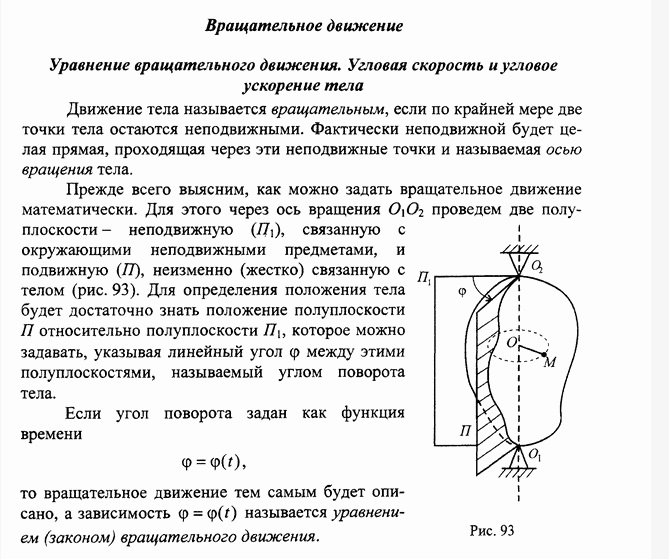
Вращательные колебания. Критическое число оборотов.
Соответственно,
для вращательного движения можно ввести
величину, определяемую отношением
изменения угловой скорости ко времени,
в течение которого это изменение
происходит – угловое ускорение: 
Угловое ускорение показывает, на сколько изменилась угловая скорость за единицу времени.
Чтобы получить единицу углового ускорения, нужно в его определяющую формулу подставить единицы угловой скорости 1 рад/с и времени – 1 с. Получаем:

При вращении перемещению тела соответствует угол вращения, линейной скорости – угловая скорость, линейному ускорению – угловое ускорение, то аналогичное уравнение для вращательного движения будет иметь вид:

Другому уравнению для поступательного движения будет соответствовать уравнение для вращательного движения:

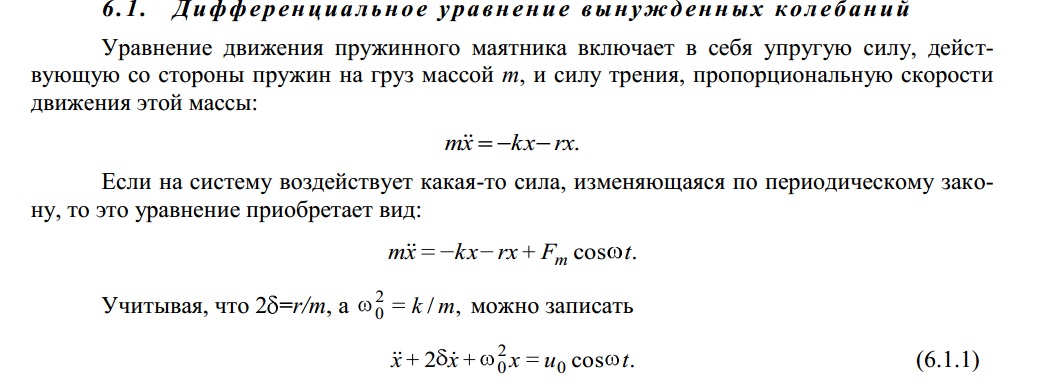
Вынужденные механические колебания под действием синусоидальной силы.
Если на колебательную систему действует периодически изменяющаяся внешняя сила, то система совершает колебания, характер которых в той или иной мере повторяет характер изменения этой силы. Такие колебания называются вынужденными. Установившиеся вынужденные колебания происходят с частотой, равной частоте вынуждающей силы.
Гармонические колебания и их характеристики. Векторная диаграмма.
Гармонические колебания — колебания, при которых физическая (или любая другая) величина изменяется с течением времени по синусоидальному или косинусоидальному закону. Кинематическое уравнение гармонических колебаний имеет вид.
Гармоническими являются колебания, которые происходят под действием силы, пропорциональной смещению колеблющейся точки и направленной противоположно этому смещению.
![]()
или
![]() ,
,
где х —
смещение (отклонение) колеблющейся
точки от положения равновесия в момент
времени t; А —
амплитуда колебаний, это величина,
определяющая максимальное отклонение
колеблющейся точки от положения
равновесия; ω —
циклическая частота, величина, показывающая
число полных колебаний происходящих в
течение 2π секунд; ![]() —
полная фаза колебаний,
—
полная фаза колебаний, ![]() —
начальная фаза колебаний.
—
начальная фаза колебаний.
Обобщенное гармоническое колебание в дифференциальном виде
![]()
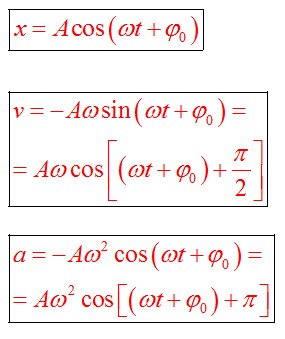
ХАРАКЕРИСТИКИ:
Если колебание описывать по закону косинуса
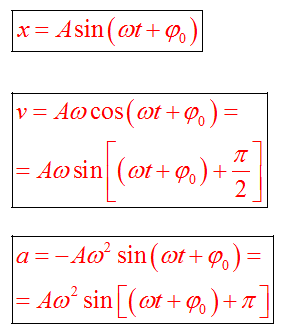
Если колебание описывать по закону синуса
Векторная диаграмма — графическое изображение меняющихся по закону синуса (косинуса) величин и соотношений между ними при помощи направленных отрезков — векторов. Векторные диаграммы широко применяются в электротехнике, акустике, оптике, теории колебаний и так далее.
Гармоническое (то есть синусоидальное) колебание может быть представлено графически в виде проекции на некоторую ось (обычно берут ось координат Оx) вектора, вращающегося с постояннойугловой скоростью ω. Длина вектора соответствует амплитуде, угол поворота относительно оси (Ox) — фазе.
Сумма (или разность) двух и более колебаний на векторной диаграмме представлена при этом (геометрической) суммой[1] (или разностью) векторов этих колебаний. Мгновенное значение искомой величины определяется при этом проекцией вектора суммы на ось Оx, амплитуда — длиной этого вектора, а фаза — углом его поворота относительно Ox.
Примеры применения - Механика; гармонический осциллятор
Гармонические осцилляторы: пружинный, математический и физический маятники.
Гармоническим осциллятором называется система, совершающая колебания, описываемые уравнением вида (140.6):
![]()
Колебания гармонического осциллятора являются важным примером периодического движения и служат точной или приближенной моделью во многих задачах классической и квантовой физики. Примерами гармонического осциллятора являются пружинный, физический и математический маятники, колебательный контур (для токов и напряжений столь малых, что элементы контура можно было бы считать линейными; см. §146).
1. Пружинный маятник — это груз массой т, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы F=-kx, где k — коэффициент упругости, в случае пружины называемый жесткостью. Уравнение движения маятника
Формула (142.3) справедлива для упругих колебаний в пределах, в которых выполняется закон Гука т. е. когда масса пружины мала по сравнению с массой тела.
Потенциальная энергия пружинного маятника, равна
П=kх2/2.
2. Физический маятник — это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси подвеса, не проходящей через центр масс тела (рис.201).

где У — момент инерции маятника относительно оси, проходящей через точку О, l — расстояние между точкой подвеса и центром масс маятника, F=-mgsinmg — возвращающая сила (знак минус обусловлен тем, что направленияF и всегда противоположны; sin соответствует малым колебаниям маятника, т. е. малым отклонениям маятника из положения равновесия).
Уравнение (142.4) можно записать в виде
![]()
т. е. ОО' всегда больше ОС. Точка подвеса О и центр качаний О' обладают свойством взаимозаменяемости: если ось подвеса перенести в центр качаний, то точка О прежней оси подвеса станет новым центром качаний и период колебаний физического маятника не изменится.
3, Математический маятник— это идеализированная система, состоящая из материальной точки массой т, подвешенной на нерастяжимой невесомой нити, и колеблющаяся под действием силы тяжести. Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити.
Момент инерции математического маятника J=ml2,
где l — длина маятника.
Так как математический маятник можно представить как частный случай физического маятника, предположив, что вся его масса сосредоточена в одной точке — центре масс.