

I7. Взаимодействие корпуса, гребного винта и средств управления (су) при торможении судна. Периоды пассивного и активного торможения судов с врш и вфш
Взаимодействие корпуса, винта и руля судна на режиме реверса определяется механизмом осуществления данного маневра и для судов, оборудованных различными типами движителей, имеет принципиальные отличия. Для судна, оборудованного ВФШ (винтом фиксированного шага) с малооборотным дизелем и системой ДАУ, реверс осуществляется следующим образом. Судоводитель осуществляет перекладку ДАУ, в результате чего система автоматики отключает подачу топлива. В этот период (10-15 с) судно продолжает двигаться вперед и режим взаимодействия ДРК (движительно-рулевого комплекса) с корпусом судна соответствует нормальному переднему ходу. После прекращения подачи топлива частота вращения гребного вала начинает падать за счет сопротивления винта и вращающихся элементов двигателя. После достижения критической частоты ( 30-40% от первоначальной) автоматически или судоводителем, в зависимости от типа ДАУ, осуществляется подача контрвоздуха для торможения дизеля. После остановки дизеля начинается раскрутка его пусковым воздухом на задний ход. Таким образом, реверс судна, оборудованного ВФШ и дизелем, имеет четыре периода. Реверс судна, оборудованного ВРШ (винтом регулируемого шага) осуществляется путем перекладки лопастей винта на задний ход без изменения направления вращения. Лопасти перекладываются за 15-20 с в зависимости от типа системы управления. После этого начинается период активного торможения. В результате реверс судна с ВРШ имеет три периода.
В зависимости от того, в каком периоде находится процесс реверса взаимодействие ДРК с корпусом судна осуществляется по-разному. Так, до начала активного торможения природа явления засасывания приблизительно соответствует нормальному переднему ходу и его можно принять неизменным. После начала активного торможения (четвертый период у судна с ВФШ и третий период у судна с ВРШ) поток от винта воздействует в сторону корпуса и, достигая его, образует повышенное давление, сменяя тем самым направление силы засасывания. Попутный поток слегка уменьшается в процессе активного торможения, однако это явление незначительно.
Руль судна в течение трех периодов у судна с ВФШ и двух периодов у судна с ВРШ находится в потоке винта, однако скорость его обтекания уменьшается по мере перехода к активному торможению, что снижает эффективность руля по сравнению с нормальным движением передним ходом. После достижения периода активного торможения поток винта меняет свое направление, изолируя руль от набегающего потока за счет движения судна,
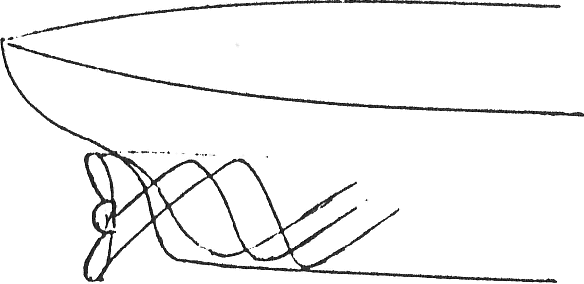
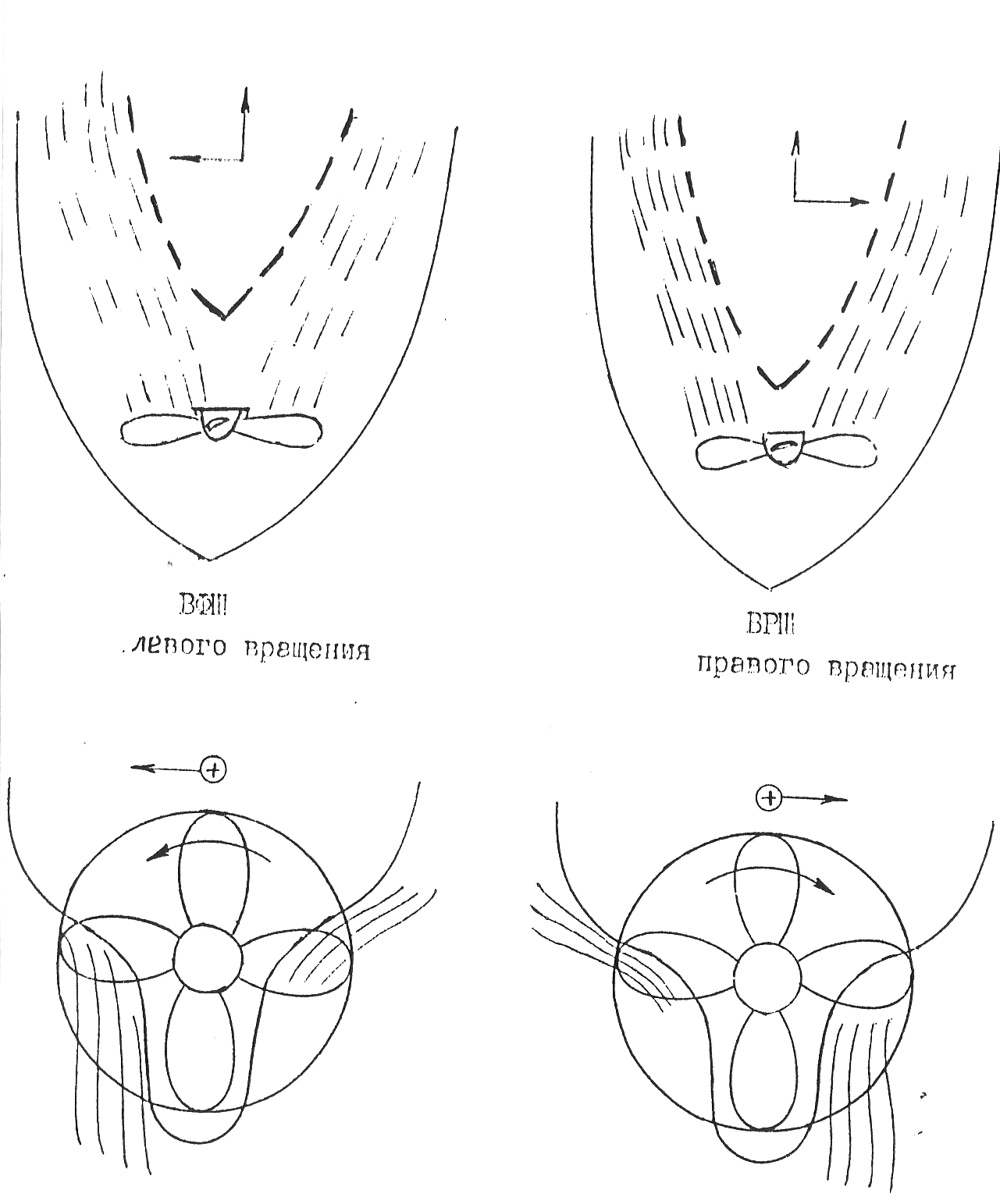
делая его практически неэффективным. При этом после достижения кормовой
оконечности струя винта воздействует на корпус судна, образуя вследствие неравномерности его обтекания помимо повышения давления еще и поперечную нагрузку на кормовой оконечности (см. рис.).
Нужно запомнить следующее правило. Судно с ВФШ ( исходного правого направления вращения) будет отклоняться вправо вследствие того, что нагрузка от винтовой струи будет отклонять корму влево. Судно с ВРШ правого вращения будет отклоняться влево вследствие того, что нагрузка от винтовой струи стремится отклонить корму вправо
Траектория движения может быть определена из следующей системы дифференциальных уравнений:
![]()
![]()
![]() ,
,
где ii — присоединенные массы, m - масса судна,
Х,Y,M - проекции продольных и поперечных аэрогидродинамических сил и моментов, а также сил и моментов от действия ДРК и дополнительных нагрузок на корпусе судна.
Упрощенно дифференциальные уравнения выглядят следующим
образом.
Первого периода у судов с ВФШ и BPШ:
![]()
второго и третьего периода судов с ВФШ и второго периода судов с ВРШ:
![]()
![]()
Четвертого периода судов с ВФШ и третьего периода судов с ВРШ
![]()
![]() k1(1-
t)
n2
D4
; Mc=
k2(1-t)
)
n2
D5
k1(1-
t)
n2
D4
; Mc=
k2(1-t)
)
n2
D5
k1=f1
(
)
;
k2=f2(
); =![]() ,
,
где
![]() -
коэффициент попутного потока; t
- коэффициент
засасываний;
-
коэффициент попутного потока; t
- коэффициент
засасываний;
R(V) - сопротивление корпуса; n - частота вращения винта; D - диаметр винта; - плотность воды; k1, k2 - коэффициент упора, коэффициент момента; - относительная поступь винта.
m1 = m + 11 .