

Первая аксиома определяет уравновешенную систему сил. Система сил, приложенная к материальной точке, является уравновешенной, если под ее воздействием точка находится в состоянии относительного покоя или движется равномерно и прямолинейно.
Вторая аксиома устанавливает условие равновесия двух сил. Две равные по модулю или численному значению силы (Fx — F2),
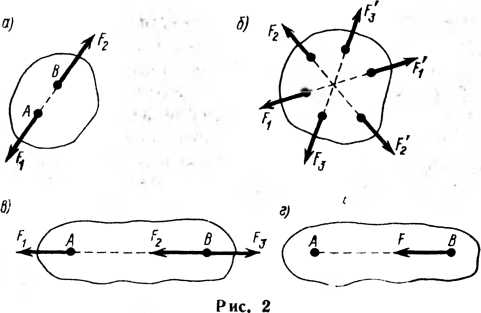
приложенные к абсолютно твердому телу и направленные по одной прямой в противоположные стороны, взаимно уравновешиваются (рис. 2, а).
Третья аксиома служит основой для преобразования сил. Не нарушая механического состояния абсолютно твердого тела, к нему можно приложить или отбросить от него уравновешенную систему сил.
Четвертая аксиома определяет правило сложения двух сил. Равнодействующая двух сил, приложенных к одной точке, приложена в этой точке и является диагональю параллелограмма, построенного на данных силах.
1. Абсолютно твердые тела могут вступать во взаимодействие, в результате которого изменяется характер их движения. Сила является мерой этого взаимодействия. Например, взаимодействие планет и Солнца определяется силами тяготения. Действие силы на тело определяется тремя факторами: численным значением, направлением и точкой приложения, т. е. сила является векторной величиной.
Вектор силы изображается отрезком, на конце которого ставится стрелка. Стрелка указывает направление вектора, длина отрезка — значение вектора, измеренное в выбранном масштабе.
Вектор в тексте обозначают одной буквой со стрелкой наверху F,
а, V, а на схемах (рис. 1, а, б) стрелки не ставятся, так как само обозначение вектора в виде направленного отрезка достаточно наглядно характеризует его свойства.
Модуль или численное значение силы в СИ измеряется в ньютонах (Н). Применяют также и более крупные единицы измерения: 1 кильньютон (1 кН = 10s Н), 1 меганьютон (1 МН = 106 Н).
Системой сил называют совокупность нескольких сил, приложенных к телу, точке или системе тел и точек.
Система сил, линии действия которых лежат в разных плоскостях, называется пространственной. Если же линии действия рассматриваемых сил лежат в одной плоскости, система называется плоской. Система сил с пересекающимися в одной точке линиями действия называется сходящейся. Сходящаяся система сил может быть как пространственной, так и плоской. Наконец, различают еще систему параллельных сил, которая аналогично сходящейся может быть пространственной или плоской.
определения следует, что две системы сил, эквивалентные третьей, эквивалентны между собой. Любую сложную систему сил всегда можно за- менить более простой эквивалентной ей системой сил. Одну силу, эквивалентную данной системе сил, называют равнодействующей этой системы. Силу, равную по модулю равнодействующей и направленную по той же линии действия, но в противоположную сторону, называют уравновешивающей силой. Если к системе сил добавлена уравновешивающая сила, то полученная новая система находится в равновесии и соответственно эквивалентна нулю.
3. Связи и их реакции
Рассматриваемые в механике тела могут быть свободными и несвободными. Свободным называют тело, которое не испытывает никаких препятствий для перемещения в пространстве в любом направлении. Если же тело связано с другими телами, которые ограничивают его движение в одном или нескольких направлениях, то оно является несвободным. Тела, которые ограничивают движение рассматриваемого тела, называют связями.
При взаимодействии между телом и его связями возникают силы, противодействующие возможным движениям тела. Эти силы действуют на тело со стороны связей и называются реакциями связей.
Реакция связи всегда противоположна тому направлению, по которому связь препятствует движению тела. Существование реакций обосновывается аксиомой о действии и противодействии. Для определения реакций связей используют принцип освобождения от связей. Не изменяя равновесия тела, каждую связь можно отбросить, заменив ее реакцией.
1.2. Плоская система сходящихся сил
Силы называют сходящимися, если их линии действия пересекаются в одной точке. Различают плоскую систему сходящихся сил, когда линии действия всех данных сил лежат в одной плоскости, и пространственную систему сходящихся сил, когда линии действия сил лежат в разных плоскостях.
Рассматриваемая система сходящихся сил находится в равновесии, когда алгебраические суммы проекций ее слагаемых на каждую из двух координатных осей равны нулю.
Зависимости (12) называют уравнениями равновесия плоской , системы сходящихся сил и используют при аналитическом ре
шении задач. В дальнейшем для упрощения записи уравнений равновесия будем опускать индексы у сумм.
1.3. ПАРА СИЛ И МОМЕНТЫ СИЛ.
5.Две равные и параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой, называются парой сил.
6. Действие пары сил на твердое тело, как показывает опыт, состоит в том, что она стремится вращать это тело. Способность пары сил производить вращение определяется моментом пары, равным произведению силы на кратчайшее расстояние (взятое по перпендикуляру к силам) между линиями действия сил. Обозначим момент пары М, а кратчайшее расстояние между силами а, тогда абсолютное значение момента (рис. 19, а)
М - Fa = Га.
Кратчайшее расстояние между линиями действия сил называется плечом пары, поэтому можно сказать, что момент пары сил по абсолютному значению равен произведению одной из сил на ее плечо.
7. Момент силы относительно точки и оси
Момент силы относительно точки определяется произведением модуля силы на длину перпендикуляра, опущенного из точки на линию действия силы (рис. 23, а).
При закреплении тела в точке О сила F стремится поворачивать его вокруг этой точки. Точка О, относительно которой бе- рется момент, называется центром момента, а длина перпендикуляра а — плечом силы относительно центра момента.
Момент силы F относительно О определяется произведением силы на плечо
М0 (F) = Fa.
1.4
5.Опорные устройства балочных систем
Шарнирно-подвижная опора (рис. 36, а). Эта опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. В этой опоре известны точка приложения опорной реакции — центр шарнира и ее направление — перпендикуляр к опорной плоскости. Здесь остается неизвестным
Шарнирно-неподвижная форма (рис. 36, в). Эта опора допускает поворот вокруг оси шарнира, но не допускает никаких линейных перемещений.
Жесткая заделка (защемление) (рис. 36, г). Такая опора не допускает ни линейных перемещений, ни поворота. Неизвестными в данном случае являются не только значение и направление реакции, но и точка ее приложения. Поэтому жесткую заделку
заменяют силой реакции RA и парой сил с моментом МА.
10. Поверйем силы Ft и F2 на произвольный угол а, т. е. изменим их направление, сохранив параллельность. При этом равнодей¬ствующая останется равной их сумме, параллельной им, направ¬ленной в ту же сторону, а линия ее действия опять поделит пря¬мую АВ на части, обратно пропорциональные значениям задан¬ных сил. На рис. 42, а точкой С обозначено пересечение линии
действия равнодействующей в линией АВ. Эта точка называется центром параллельных сил, и ее положение не зависит от направ¬ления слагаемых сил Любое тело можно рассматривать как состоящее из большого числа малых частиц, на которые действуют силы тяжести. Все эти силы направлены к центру Земли по радиусу. Так как раз¬меры тел, е которыми приходится иметь дело в технике, ничтожно малы по сравнению в радиусом Земли (значение его около 6371 км), то можно считать, что приложенные к частицам еилы тяжести параллельны и вертикальны. Следовательно, силы тяжести от¬дельных частиц тела образуют систему параллельных сил. Равно¬действующую этих сил называют силой тяжести.
Центр параллельных сил тяжести, действующих на все ча¬стицы тела, называется центром тяжести тела. Центр тяжести тела не меняет своего положения при повороте тела.