

Глава III устройство и работа механизмов
Механизмы представляют собой устройства (искусственно созданные механические системы) для передачи или преобразования движения одного или нескольких тел в требуемые движения других тел.
Твердые тела, входящие в состав механизма, называют звеньями. Звеньями являются, например, шатуны, поршни, валы, подшипники, приводные ремни.
Подвижное соединение двух соприкасающихся звеньев, например соединение вала и подшипника, винта и гайки, называют кинематической парой.
Надо знать условные обозначения звеньев механизмов и кинематических пар на схемах, при помощи которых можно сравнительно быстро и легко изобразить устройство любого механизма или машины. В приложении приводится таблица принятых в СССР условных обозначений для кинематических схем.
Если звенья пары могут вращаться относительно друг друга, то такую кинематическую пару называют вращательной. Примерами вращательных пар являются колесо на оси, вал и подшипник.
Если одно звено кинематической пары движется прямолинейно-поступательно, то пара называется поступательной. Такую пару составляют, например, поршень и цилиндр двигателя внутреннего сгорания.
Соединение нескольких кинематических пар называется кинематической цепью. Она может содержать различное число звеньев (рис. 27). Например, у кулачкового механизма — три звена, у кривошипно-шатунного — четыре, изображенная на рисунке часть шарнирно-роликовой цепи имеет шесть звеньев; цепь у велосипеда имеет более ста звеньев.
Если некоторые звенья кинематической цепи входят лишь в одну пару, то цепь называется незамкнутой. Цепь, в которой каждое звено входит не менее чем в две пары, называется замкнутой.
Кинематические цепи делятся на плоские и пространственные. У плоской цепи движение звеньев происходит в определенпых плоскостях, параллельных одной неподвижной плоскости (например, движение шатуна, поршня и кривошипа). Цепи, не удовлетворяющие этому требованию, называются пространственными.
Механизм представляет собой замкнутую кинематическую цепь, звенья которой совершают вполне определенные движения под действием приложенных сил. Одно из звеньев механизма бывает неподвижным (стойка).
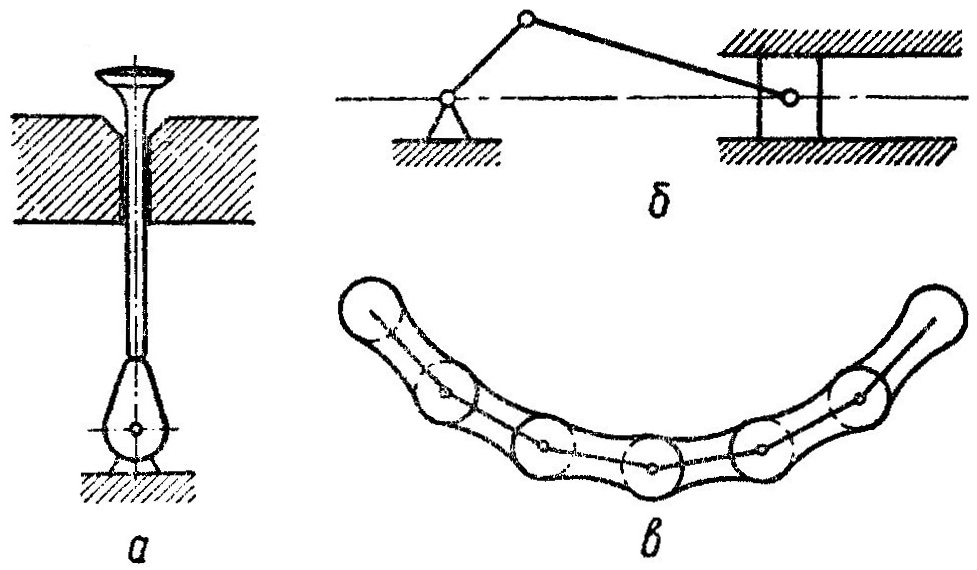
Рис. 27. Кинематические цепи:
а — кулачковый механизм; б — кривошипно-шатунный механизм; в — шарнирная цепь.
Звенья механизма, которые задают движение другим звеньям, называются ведущими или начальными. Все остальные звенья механизма, движения которых определяются движением ведущих звеньев, называются ведомыми. Например, у цепной передачи велосипеда ведущим звеном является зубчатая звездочка с шатунами, ведомыми — цепь и задняя звездочка, соединенная с колесом. Рама велосипеда является неподвижным звеном, т. е. стойкой.
В кривошипно-шатунном механизме двигателя внутреннего сгорания, имеющем четыре звена, ведущим звеном является поршень, ведомыми звеньями — шатун и кривошип, неподвижным звеном — цилиндр.
Во время работы механизмов их звенья совершают разнообразные, нередко очень сложные движения. Например, у ручной швейной машины шток вместе с иглой движется возвратно-поступательно, челнок — качается, т. е. совершает колебательное движение. Машина будет правильно шить, давая ровный и прочный шов, лишь тогда, когда все ее звенья будут двигаться согласованно, проходя определенный путь с определенной скоростью.
В производстве и быту применяется огромное количество разнообразных механизмов. По своему назначению они разделяются на механизмы передающие и на механизмы, преобразующие различные виды движения. По устройству механизмы делятся на шарнирно-рычажные, зубчатые, винтовые, фрикционные, кулачковые и другие.
Любой механизм должен быть возможно более простым по устройству, прочным, износоустойчивым, дешевым в изготовлении, удобным в обслуживании и ремонте. Поэтому при проектировании механизмов стараются уменьшить количество звеньев, выбрать прочные и легкие материалы для их Изготовления, а также заменить, где возможно, поступательные пары вращательными, чтобы добиться большей равномерности движения и уменьшения износа деталей.
Нужно отметить, что звенья, входящие в состав механизма, могут быть не только жесткими, т. е. не изменяющими; своей формы, но и гибкими, например цепи, канаты, тросы, ремни. При этом, чтобы была сохранена определенность движения, такие гибкие звенья должны как можно меньше изменять свои размеры, т. е. быть практически нерастяжимыми и несжимаемыми.
В настоящее время перспективными являются механизмы, которые осуществляют преобразование движения посредством жидкости или газа.