

Лабораторно-практическая работа по изучению механизмов передачи движения
Определить вид передачи вращательного движения (ременной, цепной, зубчатой, фрикционной) и указать ее назначение.
Начертить кинематическую схему передачи.
Определить основные характеристики, передачи:
i — передаточное число;
А — расстояние между осями валов;
D и d —диаметры ведущего и ведомого звеньев (шкивов, колес, звездочек);
z1 и z2 — числа зубьев ведущего и ведомого колес;
m — модуль зубчатой передачи.
Составить перечень деталей передачи по форме:
№ пп. |
Наименование |
Назначение |
Количество |
Материал |
|
|
|
|
|
Контрольные вопросы и задачи
Каковы преимущества и недостатки ременной передачи по сравнению с цепной?
Как определить передаточное число многоступенчатой передачи (ременной, зубчатой)?
Каково соотношение между крутящими моментами на ведущем и ведомом валах любой передачи (с учетом к. п. д.)?
Приведите примеры применения различных видов ременной, зубчатой, цепной передач.
Что такое модуль зубчатой передачи? Может ли быть зацепление между зубчатыми колесами с разным модулем?
С помощью, каких зубчатых передач можно передавать вращение между скрещивающимися валами?
Как определить передаточное число червячной передачи?
Для чего применяются реверсивные зубчатые механизмы и как они устроены?
Какова будет величина крутящего момента Мг на ведомом валу, если на ведущем крутящий момент М1 = 500 кГ·см и его передача осуществляется при помощи конических зубчатых колес (см. рис. 32, 6) z1 = 11, z2=55?
Подсчитайте передаточные числа всех передач коробки скоростей (см. рис. 37) и постройте графики передачи движения, если: z1=14; z2=18; z3=12; z4=18; z5=14; z6=20; z7=10; z8=9; z9=17.
§ 2. Механизмы преобразования движения
В различных машинах часто один вид движения преобразуется в другой, например вращательное движение — в поступательное или колебательное, поступательное — во вращательное я т. п. Для этого служат различные механизмы преобразования движения. Наиболее распространенными из них являются винтовой, кривошипно-шатунный, кулисный и кулачковый механизмы.
Винтовой механизм состоит из неподвижного винта и подвижной гайки или подвижного винта и неподвижной гайки. В зависимости от характера движения этих звеньев могут быть различные случаи.
Ведущим звеном (рис. 41, а) является винт 1, имеющий гладкую шейку, вращающуюся в подшипнике. При этом винт не имеет возможности перемещаться поступательно. Гайка может перемещаться поступательно вдоль стойки, но не вращаться. Вращательное движение винта преобразуется в поступательное движение подвижной губки (ползуна) 2, скрепленной с гайкой. При одном обороте винта ползун перемещается поступательно на величину шага винтовой линии. Такой винтовой механизм используется в поперечных салазках суппорта токарного станка, а также в станочных, тисках.
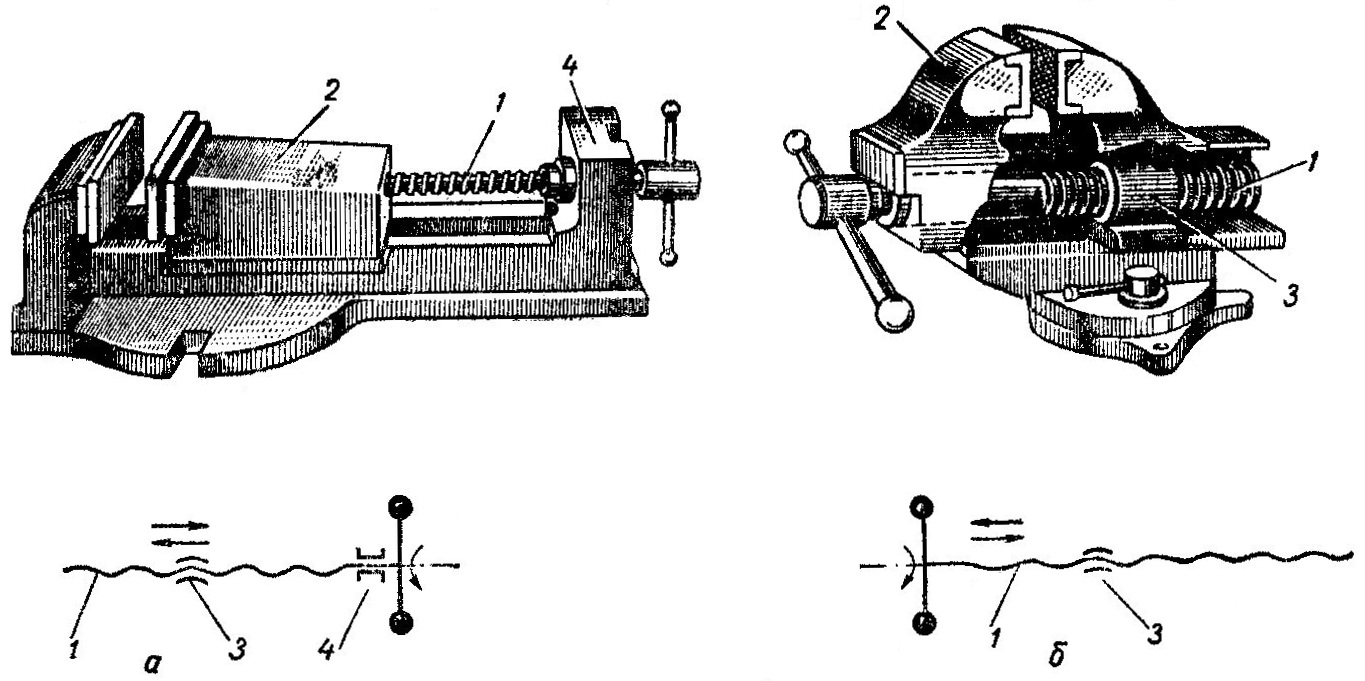
Рис. 41. Винтовые механизмы в тисках:
а — с неподвижным винтом и перемещающейся вдоль него гайкой; б — с неподвижной гайкой и перемещающимся винтом; 1 — винт; 2 — подвижная губка; 3 — гайка; 4 — подшипник.
Ведущим звеном является винт 1 (рис. 41, б), соединенный с подвижной губкой 2 и вращающийся в неподвижной гайке 3. Подвижная губка (ползун) перемещается поступательно по направляющим. В механизме этого вида вращательно-поступательное движение винта преобразуется в поступательное движение ползуна. Такой механизм применяется в винтовых прессах и слесарных параллельных тисках.
Встречается также случай, когда вращательное движение гайки преобразуется в поступательное движение винта. Механизм такого вида применяется в винтовых домкратах, в некоторых конструкциях слесарных параллельных тисков, у которых винт жестко скреплен с подвижной задней губкой (ползуном), а гайка посредством рукоятки вращается в подшипнике стойки.
Как известно, чем больше угол подъема винтовой линии, тем меньше трение в винтовом механизме. При больших углах подъема винтовой линии в винтовом механизме отсутствует самоторможение, что обусловливает возможность самоотвинчивания составляющих его деталей. Для того чтобы получить самотормозящиеся винтовые механизмы в слесарных тисках, домкратах, их делают с малыми углами подъема винтовой линии (до 5°).
Винтовые механизмы используются в самых разнообразных условиях. Соединением винтов с правой и левой резьбой можно получить стяжные устройства, применяемые, например, при сцеплении вагонов, для натяжения тросов.
Винты, имеющие прямоугольную и трапециевидную резьбу, используют для винтовых механизмов в домкратах, прессах, тисках, станках и других устройствах, где движение сопровождается передачей больших усилий. Это объясняется тем, что эти виды резьбы обладают большей прочностью и меньшим трением по сравнению с треугольной резьбой.
Кривошипно-шатунный механизм (рис. 42) состоит из четырех звеньев: стойки (блока цилиндров) 1, кривошипа (коленчатого вала) 2, шатуна 3 и ползуна (поршня) 4. Если ведущим звеном является ползун, то механизм преобразует возвратно-поступательное движение ползуна во вращательное движение кривошипа, например в паровой машине, двигателе внутреннего сгорания.
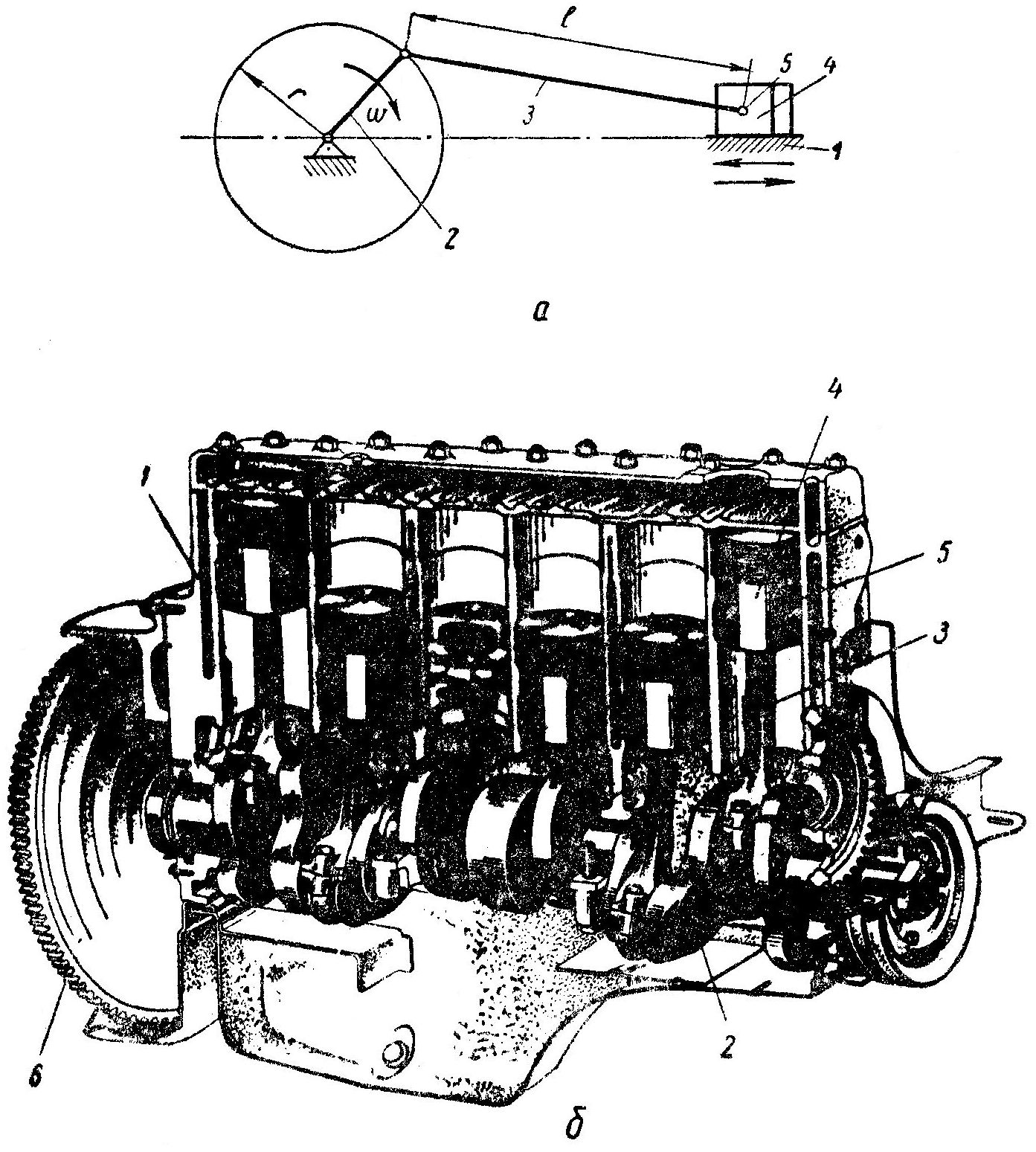
Рис. 42. Кривошипно-шатунный механизм:
а — кинематическая схема; б — кривошипно-шатунный механизм двигателя внутреннего сгорания;
1 — стойка (блок цилиндров); 2 — кривошипный (коленчатый) вал; 3 — шатун; 4 — ползун (поршены);
5 — деталь соединения ползуна (поршня) с шатуном (палец); 6 — маховик.
Крайние точки, занимаемые ползуном при его движении, называются мертвыми точками. В этих точках скорость ползуна равна нулю. Расстояние между мертвыми точками называется ходом ползуна. Легко видеть, что ход ползуна равен двойной длине кривошипа, т. е. 2 r.
Для того чтобы кривошип имел определенное движение в мертвых точках, на его валу закрепляют тяжелые колеса (маховики), которые благодаря своей инерции выводят его из мертвых точек. В машинах с несколькими ползунами (поршнями), например в автомобильных двигателях, кривошипы располагают так, чтобы они выводили друг друга из мертвых точек.
Если ведущим звеном является кривошип, то механизм преобразует вращательное движение вала в возвратно-поступательное движение ползуна (поршня), например в поршневых компрессорах и насосах, в механической ножовке.
В этих машинах кривошип получает движение от двигателя и передает его через шатун ползуну (поршню), который производит требуемую работу: сжимает газ, режет металл и т. п.
Для того чтобы кривошипно-шатунный механизм мог работать, длина кривошипа должна быть меньше длины шатуна, так как только при этом условии вал сможет проворачиваться.
Для достижения более равномерной работы кривошипно-шатунного механизма, кроме маховиков, применяют также тяжелые противовесы, закрепленные на валу кривошипа.
Решающее значение для плавной и устойчивой работы механизма имеет тщательная обработка направляющих ползуна и применение смазки. Поэтому цилиндры и поршни двигателей, компрессоров и других машин регулярно смазывают при работе.
Э ксцентриковый
механизм (рис. 43) получается из
кривошипно-шатунного, если кривошип
заменить плоским диском
2,
называемым эксцентриком. При этом
необходимо увеличить внутренний диаметр
нижней головки шатуна, чтобы она могла
охватить эксцентрик. Звено
3, шарнирно соединенное с
эксцентриком
2 и ползуном
4, называется эксцентриковой
тягой. Эксцентриковый механизм необратим,
т. е. допускает преобразование движения
только в одном направлении — от
вращающегося эксцентрика к
возвратно-поступательно движущемуся
ползуну.
ксцентриковый
механизм (рис. 43) получается из
кривошипно-шатунного, если кривошип
заменить плоским диском
2,
называемым эксцентриком. При этом
необходимо увеличить внутренний диаметр
нижней головки шатуна, чтобы она могла
охватить эксцентрик. Звено
3, шарнирно соединенное с
эксцентриком
2 и ползуном
4, называется эксцентриковой
тягой. Эксцентриковый механизм необратим,
т. е. допускает преобразование движения
только в одном направлении — от
вращающегося эксцентрика к
возвратно-поступательно движущемуся
ползуну.
Э ксцентриковые
механизмы применяются, например, в
паровых машинах для приведения в
движение золотников, в двигателях
внутреннего сгорания, для привода
насосов, в прессах для штамповки изделий.
ксцентриковые
механизмы применяются, например, в
паровых машинах для приведения в
движение золотников, в двигателях
внутреннего сгорания, для привода
насосов, в прессах для штамповки изделий.
В поперечно-строгальных станках, швейных и других машинах часто применяется кулисный механизм с качающейся кулисой (рис. 44), близкий по своему устройству к кривошипно-шатунному: в нем вращение кривошипа 3 преобразуется в качательное движение кулисы 1. Этот механизм также состоит из четырех звеньев: стойки 2, кривошипа 3, кулисы 1 и камня 4. Ведущим звеном является кривошип, равномерно вращающийся вокруг оси. Кулиса отклоняется на наибольший угол, когда кривошип приходит в крайние положения, т. е. когда он становится перпендикулярным к оси кулисы.
В поперечно-строгальном станке ведущее звено (кривошип) вращается равномерно против часовой стрелки. При этом камень находится в верхнем положении и перемещает верхний конец кулисы, а вместе с ней и ползун станка справа налево, причем резец осуществляет рабочий ход, т. е. снимает стружку. Когда камень идет вниз, верхний конец кулисы идет обратно, слева направо, вместе с ползуном и резцом, т. е. имеет место холостой ход, так как стружка не снимается. Так как кривошип вращается равномерно, то на холостой ход затрачивается в 2—3 раза меньше времени, чем на рабочий. Возможность увеличить скорость холостых ходов — основное преимущество кулисного механизма по сравнению с кривошипно-шатунным.
Кулачковый механизм используют тогда, когда вращательное движение нужно преобразовать в сложное повторяющееся движение, совершающееся по определенному замкнутому циклу, для того чтобы, например, замыкать и размыкать контакты, передвигать заготовку или резец на станке, поднимать и опускать клапан и т. д.
Кулачковый механизм (рис. 45) Состоит из неподвижной стойки 1, кулачка 2, толкателя 3 или коромысла 4. Кулачок упирается в плоскую часть толкателя, называемую башмаком, или в специальный ролик 5. который делают для уменьшения трения. Ведущим звеном является кулачок, который, вращаясь, касается ведомого звена (толкателя) в точке или по линии.
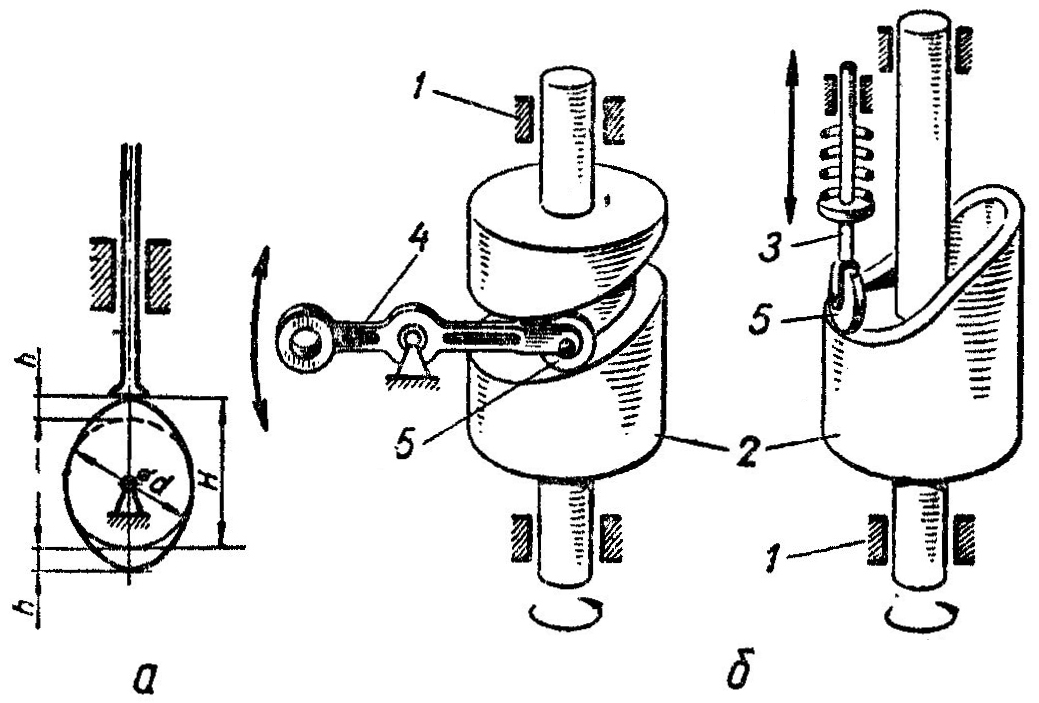
Рис. 45. Схема кулачкового механизма:
а — с дисковым кулачком; б — с цилиндрическим кулачком;
1 — стойка; 2 — кулачок; 3 — толкатель (ползун); 4 — коромысло; 5 — ролик.
Если в работе механизма требуется за один оборот кулачка сделать несколько движений толкателя, то применяют кулачки с несколькими выступами, так называемые многократные (рис. 46). Такие многократные кулачки применяют, например, в механизме прерывателя многоцилиндрового двигателя внутреннего сгорания.
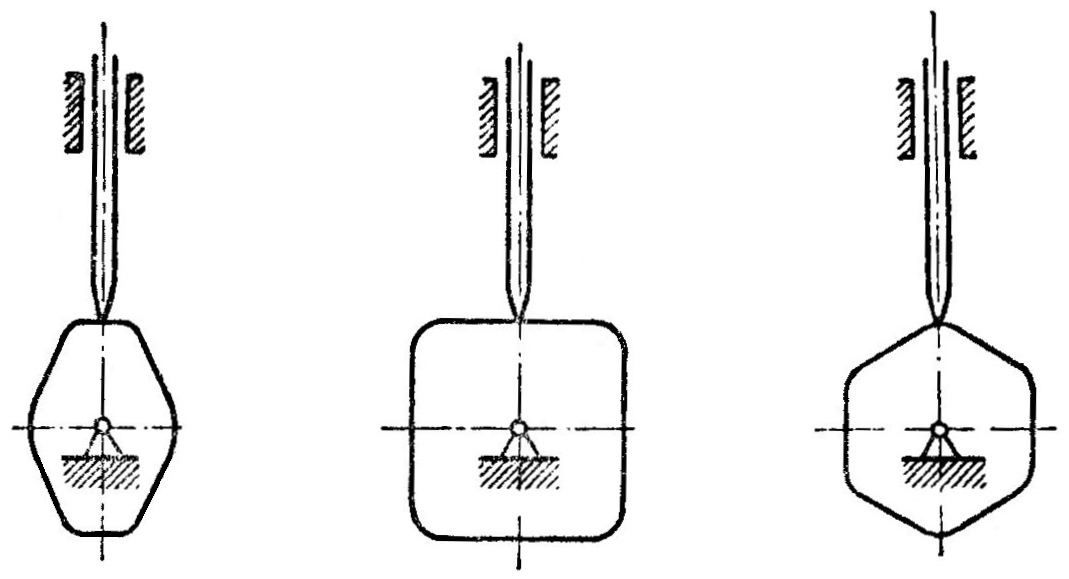
Рис. 46. Многократные кулачки.
К улачковые
механизмы очень удобны тем, что они
позволяют сообщать любое движение
толкателю, которое требуется при работе
механизма, — равномерное или с ускорением,
плавное или прерывистое. В связи с
тем, что кулачок касается толкателя
на очень небольшой площадке, он испытывает
очень большое давление. Поэтому, чтобы
повысить износоустойчивость кулачков,
их изготовляют из углеродистой или
легированной стали и подвергают
закалке.
улачковые
механизмы очень удобны тем, что они
позволяют сообщать любое движение
толкателю, которое требуется при работе
механизма, — равномерное или с ускорением,
плавное или прерывистое. В связи с
тем, что кулачок касается толкателя
на очень небольшой площадке, он испытывает
очень большое давление. Поэтому, чтобы
повысить износоустойчивость кулачков,
их изготовляют из углеродистой или
легированной стали и подвергают
закалке.
Для преобразования вращательного движения в поступательное, кроме кривошипно-шатунного и кулачкового механизмов, нередко применяется реечный зубчатый механизм. Реечный механизм (рис. 47) состоит из цилиндрического зубчатого колеса 1 и прямой зубчатой рейки 2.
В реечном механизме при вращении зубчатого колеса рейка движется прямолинейно-поступательно; такой механизм применяется, например, в сверлильном станке для подачи сверла. В других случаях зубчатое колесо катится и перемещается поступательно вдоль неподвижной рейки, например в токарном станке для продольного перемещения суппорта.
Х раповой механизм
(рис. 48) служит для преобразования
качательного движения в прерывисто-вращательное
в одном направлении. Он применяется,
например, в поперечно-строгальном стайке
для поперечной подачи стола и состоит
из стойки 1, храповика (зубчатого
колеса) 4, рычага 2, собачки
3.
раповой механизм
(рис. 48) служит для преобразования
качательного движения в прерывисто-вращательное
в одном направлении. Он применяется,
например, в поперечно-строгальном стайке
для поперечной подачи стола и состоит
из стойки 1, храповика (зубчатого
колеса) 4, рычага 2, собачки
3.
Зубья храповика скошены в одну сторону. Храповик неподвижно соединен с ведомым валом Механизма. На этом же валу шарнирно закреплен рычаг 2, который поворачивается (качается) под действием приводной штанги 6.
Во время работы храпового механизма приходит в движение рычаг 2, собачка 3 упирается в зуб храповика и толкает его вперед, вследствие чего храповик, а с ними и ведомый вал поворачиваются. Когда рычаг 2 поворачивается направо, собачка свободно скользит по закругленной части зубьев храповика и под действием своего веса или специальной пружины 7 заскакивает во впадину следующего зуба.
Для того чтобы храповик с ведомым валом не поворачивался обратно при холостом ходе рычага с собачкой, ставят дополнительно стопорную собачку 5, шарнирно закрепленную на неподвижной оси и прижатую к храповику пружиной.
Храповой механизм применяется не только для преобразования движения, но и как стопорное устройство в лебедках и других подъемных машинах. В этом случае он состоит лишь из храповика и стопорной собачки.
Для того чтобы механизм работал более надежно, иногда делают несколько собачек, прижимаемых к храповику сильными пружинами.