

Часть 2. Информационные эмп
План темы:
8.1. Тахогенераторы
8.2. Вращающиеся трансформаторы.
8.3. Сельсины
Тема 8. Тахогенераторы
8.1. Общие сведения
Тахогенератором называется ЭМП, преобразующий U (датчик скорости)
Функциональное назначение: а) Измерительные –тахометры
Область применения: б) Управляющие в следящих системах
Основная характеристика – выходная U= U ()
Требования: а) Линейность U=к (К-const - определяет точность)
б) Крутизна К - (Определяет чувствительность.)
в) Симметрия U()= - U(-).
г) min U(=0) – остаточное напряжение – зона нечувствительности.
д) Быстродействие ,что обеспечивается J, а также Mсопр.
Классификация
|
Тахогенераторы |
|
|||||
|---|---|---|---|---|---|---|---|
|
Постоянного тока |
Переменного тока |
|
||||
Электромагнитные |
Магнитоэлектрические |
Асинхронные |
Синхронные |
||||
8.2.Тг постоянного тока
1.Конструкция – обычная машина постоянного тока малой мощности.
Н
![]() о,
магнитная система не насыщена,
о,
магнитная система не насыщена,
ОВ Uг щетки с малым сопротивлением
U
Iн → Rн Схема включения ТГ
2. Выходная характеристика
Uвых= Uвых()
Запишем
з акон
Ома для якорной цепи и нагрузки:
акон
Ома для якорной цепи и нагрузки:
Eя = Ur + Iя Rя + ΔUщ ΔUщ
Ея = Се Ф n Подставим и выразим Ur
Ur = Iя. Rн получим: 0 n0 n
Ur = Ce Ф n - (Ur / Rн) rя + ΔUщ
Ur= CeФ/(1+(rя/Rн)) + ΔUщ/(1+(rя/Rн)
3.Линейность. Крутизна. Зона нечувствительности
Выводы: а)Характеристика линейна: Ur=K n ; Точность определяется по отклонению
б) К – крутизна - тогда чувствительность
Для этого: Ф и Rн . У современных ТГ К=3100 мВ/(об/мин)
в) Существует зона нечувствительности ΔUщ ( см на графике)
4.Влияние реакции якоря
К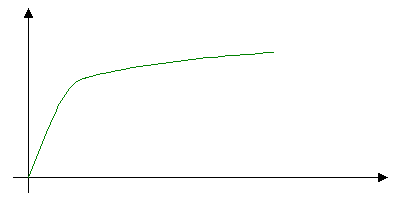
 = Се((Ф-ΔФ)/(1+(rя/Rн)) появляется
ΔФ за
= Се((Ф-ΔФ)/(1+(rя/Rн)) появляется
ΔФ за
Ф счет размагничивающего действия тока якоря, если Rн, то Кconst, т.е. нелинейность хар-ки.
В
 современных ТГ ΔФ(0.53%)
современных ТГ ΔФ(0.53%)
Б
 орются
а) либо
и магнитная система ТГ не насыщена
орются
а) либо
и магнитная система ТГ не насыщена
I б) либо вгоняют ТГв зону глубокого насыщения
5.Температурная погрешность
существенна возникает за счет зависимости rв от t. При этом Фв=Ф(rв)
Борются а) стабилизация Iв
б) «вгоняя» магнитную систему в глубокое насыщение
6. Асимметрия вых. напряжения (13%) вследствие неточности установки щеток
7. Пульсации
- якорные – неточность
- зубцовые
- коллекторные
8. Достоинства и недостатки.
а) Малые вес и габариты а) Щеточный контакт - нечувствительность
б)Uвых, К-const.
9.Наилучшая конструкция с полым ротором и магнитоэлектрическим возбуждением.
Индукционные тахогенераторы (атг)
1 Конструкция – (обычная) АМ с полым немагнитным ротором.
Статор имеет 2 сердечника - внешний внутренний
на внешнем ОВ и на внутреннем ОГ Фв Фг.
Ротор - полый немагнитным (Al)
Схема включения на рис.
2 Принцип действия
При неподвижном роторе Iв возбуждает Фds (пульсирующий), который наводит Етр .
Етр IRФR,, который компенсируется возрастанием Фds (рис.1)
При вращении IRФR поворачивается на угол относительно оси d и может быть представлен двумя составляющими: Фd и Фq. Последняя сцепляясь с Оr наводят Еr
Т.к. Фв = Ф0 cos t sin , то и Е=Еq cos t =Е0 sin cos t
Т. о. Еr = d/dt (Фq) = n, т.к. sin = при малых , а d/dt = n
U ~
ОВ U~
ОВ
~
ОВ U~
ОВ 
Ог Ог ↓Оя
↓Iя
Фтр
Zн Zн
рис 1 рис 2
3.Выходная характеристика
При подключении к Ог нагрузки возникает за счет Ег в нагрузке Ir, которые в Закон Ома для генераторной обмотки: Ur = Er- Ir Zr Рассматривая схемы замещения для полей прямой и обратной последовательности выражают входящие сюда величины через комплексные Z машины и получают выходную характеристику.
U r
=
(-j k Uв
)
Uг
r
=
(-j k Uв
)
Uг
( A-B 2)
K – коэффициент трансформации, =
– коэффициент трансформации, =
А, В комплексные параметры (R,X)
Вывод: характеристика нелинейна
При проектировании 2 для этого .
Число пар полюсов р, чтобы добиться симметрии. nн n
Выбирают рабочую частоту питающего напряжения - (1000 Гц)
4. Погрешности
4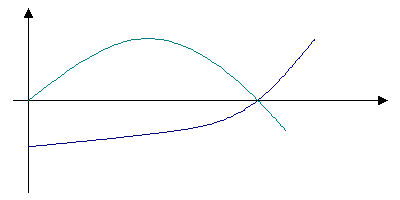 .1
Амплитудная
(скоростная)
возникает (0.2-2.5%) ΔU
.1
Амплитудная
(скоростная)
возникает (0.2-2.5%) ΔU
а) размагничивающее действие реакции Оr;
б) падения напряжения в Оr (Ir Zr)
в) Отклонения Фq от поперечной ослабляют q.
Из-за изменения инд-х сопр-ий рассеяния. n
4.2 Фазовая погрешность – за счет индуктивных
сопротивлений обмоток и Zн. Δφ
5. Асимметрия выходной характеристики – за счет
а) остаточной ЭДС при n=0 за счет 90 не точно,
б) толщины стакана ротора,
в) - неравномерности зазора.
6. Достоинства и недостатки
-
а) бесконтантные
б) J
в) Мс
г) надежность
а) Теоретически и практически Кconst
б) фазовая погрешность
в) Рвых сигнала
г) Большой Р и габариты