

2.5 Опис роботи схеми з’єднань щита керування установкою (агрегатом)
Схеми з'єднань — це схеми, на яких зображують з’єднання складових частин установки або виробу, що автоматизуються, а також проводи, кабелі або трубопроводи. Указані схеми розробляються на основі схем автоматизації, принципових схем живлення, а також загальних виглядів щитів і пультів.
Схемами з’єднань користуються при виконанні монтажних та налагоджувальних робіт на об’єкті, а також у процесі його експлуатації.
Загальні правила виконання схем з’єднань такі:
розробляють на один щит, пульт, станцію управління;
усі типи апаратів, приладів та арматури, передбачені принциповою електричною схемою, повинні бути повністю відображені на схемі з’єднань;
позиційне позначення приладів та засобів автоматизації, а також маркування ділянок ланцюгів, що прийняті на принципових схемах, необхідно зберегти на схемі з’єднань.
Застосовують три способи виконання схем з’єднань: адресний, графічний і табличний.
Для перших двох, крім перерахованих правил, слід дотримуватись ще наступних:
щит або шафу управління розвертають в одній площині, позначаючи лише ті їх конструктивні елементи, на яких розміщуються прилади та засоби автоматизації; при цьому зберігають взаємне розміщення приладів та засобів автоматизації;
прилади та засоби автоматизації зображують спрощено без збереження масштабу у вигляді прямокутників, над якими розташовують коло, розділене горизонтальною рискою навпіл. Цифри над рискою вказують порядковий номер виробу (номери присвоюються попанельно зліва направо і зверху вниз), а під рискою — позиційне позначення цього виробу (відповідно до принципової електричної схеми);
при потребі показують внутрішню схему апаратів;
для кількох реле, розміщених в одному ряду, внутрішню схему показують лише один раз (якщо вона у них одна й та ж сама);
вивідні затискачі приладів умовно зображують колами, у середині яких показують їх заводське маркування; якщо у вивідних затискачів апаратів заводського маркування немає, їх маркірують умовно арабськими цифрами, що обумовлюють у пояснюючих написах; маркування проводів і позначення затискачів на схемах з’єднань незалежні;
платам, на яких розміщуються резистори, конденсатори та інші елементи, присвоюється лише порядковий номер (проставляється в колі над рискою); позиційне позначення елементів розміщують безпосередньо біля їх умовного графічного позначення.
Схема з’єднань подана на аркуші 2 графічної частини.
Розрахункова частина
3.1 Розрахунок і побудова механічної характеристики робочої машини. Визначення режиму роботи двигуна
Для визначення еквівалентної потужності на валу робочої машини користуються її навантажувальною діаграмою.

-
М, Нм
25
20



1 5
10
5
0
4 0
120
200
280
360
440
520
600
680
760
t, c
Рисунок 3.1 Навантажувальна діаграма робочої машини
Для цього навантажувальну діаграму розбиваємо на ділянки, спрямувавши криву в межах ділянки. В результаті отримаємо декілька геометричних фігур: прямокутників , трикутників чи трапецій. На підставі цього визначаємо еквівалентний момент на валу робочої машини. Але потрібно врахувати, що еквівалентний момент для прямокутних ділянок навантажувальної діаграми визначається за формулою:
 ,
Нм
(3.1)
,
Нм
(3.1)
де,
 – усереднені моменти на валу робочої
машини на ділянках 1,2,3,4.
– усереднені моменти на валу робочої
машини на ділянках 1,2,3,4.
 = 14 Нм,
= 14 Нм,
 = 16 Нм,
= 16 Нм,
 = 17,5 Нм,
= 17,5 Нм,
 = 19 Нм;
= 19 Нм;
 – час
протікання технологічних операцій при
сталому усередненому навантаженні на
валу робочої машини,
– час
протікання технологічних операцій при
сталому усередненому навантаженні на
валу робочої машини,
 = 190 с,
= 190 с,
 = 210 с,
= 210 с,
 = 10 с,
= 10 с,
 = 160 с,
= 195 с.
= 160 с,
= 195 с.
Отже,
 Нм
Нм
Еквівалентна потужність на валу робочої машини визначається за формулою:
 ,
Вт
(3.2)
,
Вт
(3.2)
де,
 – номінальна кутова швидкість обертання
валу робочої машини,
– номінальна кутова швидкість обертання
валу робочої машини,
= 300 рад/с.
Отже,
 Вт
Вт
Еквівалентна потужність на валу електродвигуна визначається за формулою:
 ,
Вт (3.3)
,
Вт (3.3)
де, ηпер.ном – ККД передачі, ηпер.ном = 0,98.
Отже,
 Вт
Вт
Відомо, що високопродуктивний, надійний і економічно вигідний тільки такий виробничий агрегат, у якого привідний електродвигун має такі електромеханічні властивості, що відповідають характеристикам і технологічним вимогам робочої машини. Найважливішими ознаками двигунів і робочих машин є їх механічні характеристики.
Механічні характеристики робочих машин описують за такою формулою:
 ,
Нм (3.4)
,
Нм (3.4)
де, Мс - момент опору при кутовій швидкості ω, Нм;
Мрмн - момент робочої машини за номінальної кутової швидкості, Мрмн = =16,59 Нм;
Мо- момент зрушення робочої машини, Мо = 4,98 Нм;
ωн - номінальна кутова швидкість електродвигуна, ωн = 300 с-1;
ω - поточна кутова швидкість, с-1;
x - показник степеня, що характеризує зміну статичного моменту при зміні кутової швидкості, x = 2.
Отже,
при ω1 = 0, с-1
 Нм
Нм
при ω2 = 40, с-1
 Нм
Нм
при ω3 = 80, с-1
 Нм
Нм
при ω4 = 120, с-1
 Нм
Нм
при ω5 = 160, с-1
 Нм
Нм
при ω6 = 200, с-1
 Нм
Нм
при ω7 = 240, с-1
 Нм
Нм
при ω8 = 280, с-1
 Нм
Нм
при ω9 = 300, с-1
 Нм
Нм
при ω10 = 340, с-1
 Нм
Нм
Таблиця 3.1 Розрахункові дані механічної характеристики робочої машини
S |
0 |
0,133 |
0,267 |
0,4 |
0,533 |
0,667 |
0,73 |
0,8 |
0,933 |
1,0 |
ω, с-1 |
340 |
300 |
280 |
240 |
200 |
160 |
120 |
80 |
40 |
0 |
M, Нм |
18,13 |
16,59 |
15,02 |
12,41 |
10,03 |
8,24 |
6,83 |
5,76 |
5,17 |
4,98 |
За розрахунковими даними слід побудувати криву Мс = f2 (ω) в тих же координатах, що і механічна характеристика електродвигуна Мдв = f1 (ω), і в тому ж масштабі.
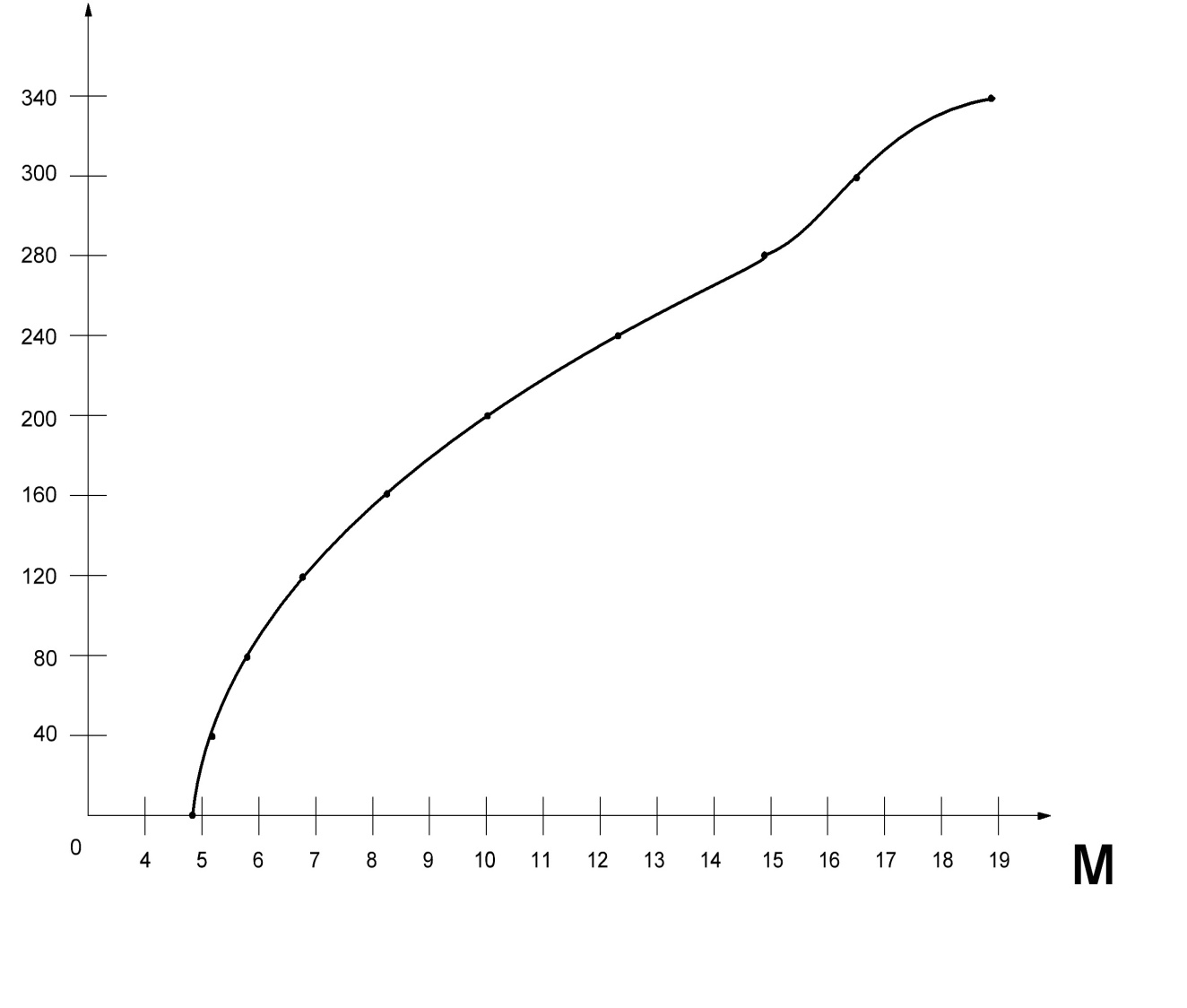
Рисунок 3.2 Механічна характеристика робочої машини
Для визначення режиму роботи електродвигуна необхідно визначити сталу часу нагрівання Тн, яка залежить від його потужності. Орієнтовно значення сталої часу нагрівання асинхронного електродвигуна потужністю 5,5 кВт приймаємо 25…30 хв.
Електропривод теплогенератора ТГ-2,5 працює в тривалому режимі роботи – S2. При даному тривалому режимі довгочасність роботи така велика, що температура електродвигуна досягає установленого значення і залишається сталою впродовж усього терміну роботи. За ГОСТами передбачаються такі тривалості робочого періоду: 15, 30, 60 і 90 хв.