

1.4.12 Понятие о балансировке еврокоптера
При управлении летательным аппаратом пилот осуществляет балансировку, то есть процесс выдерживания состояния равновесия на данном режиме полёта. Для анализа движения ЛА используется так называемая связанная система координат, состоящая из трех взаимно перпендикулярных осей, неподвижно связанных с вертолетом (см рис.22).
Начало координат выбрано в центре масс еврокоптера. Зная направление осей, можно определить силы, действующие в продольной, поперечной и азимутальной плоскостях, а также моменты этих сил.
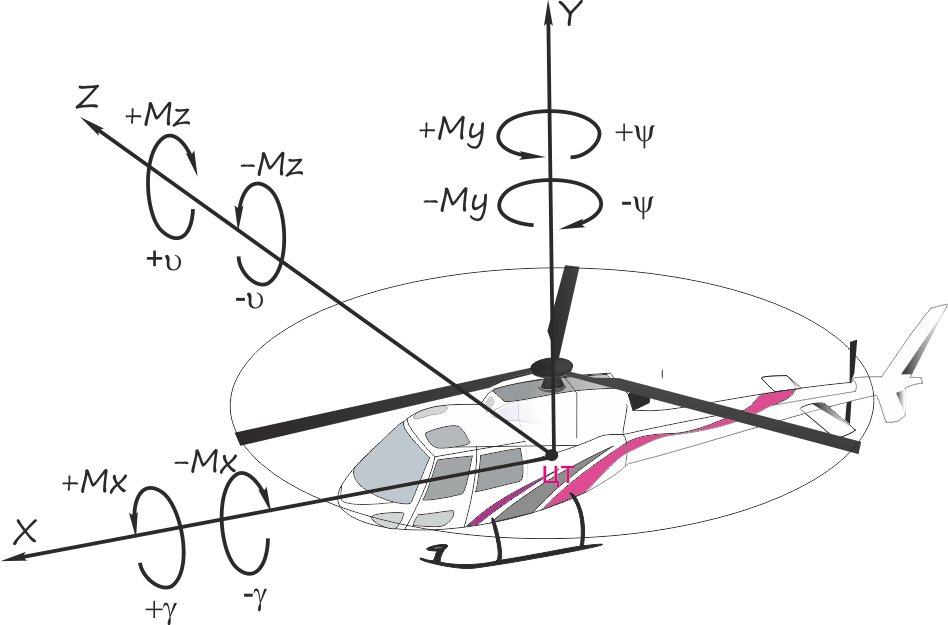
Рис.22 Связанная система координат
Условием полного равновесия ЛА является равенство нулю алгебраической суммы внешних сил и их моментов относительно центра масс.
Полное равновесие в полёте достигается путем балансировки еврокоптера, в процессе которой изменяется тяга несущего и хвостового винтов.
Балансировка вертолета рассматривается относительно осей Ох, Оу , Oz и соответственно подразделяется на продольную, поперечную и путевую. Поперечная и путевая балансировки объединяются общим понятием боковая балансировка.
1.4.13 Продольная балансировка
Целью продольной балансировки является выдерживание угла тангажа и поступательной скорости.
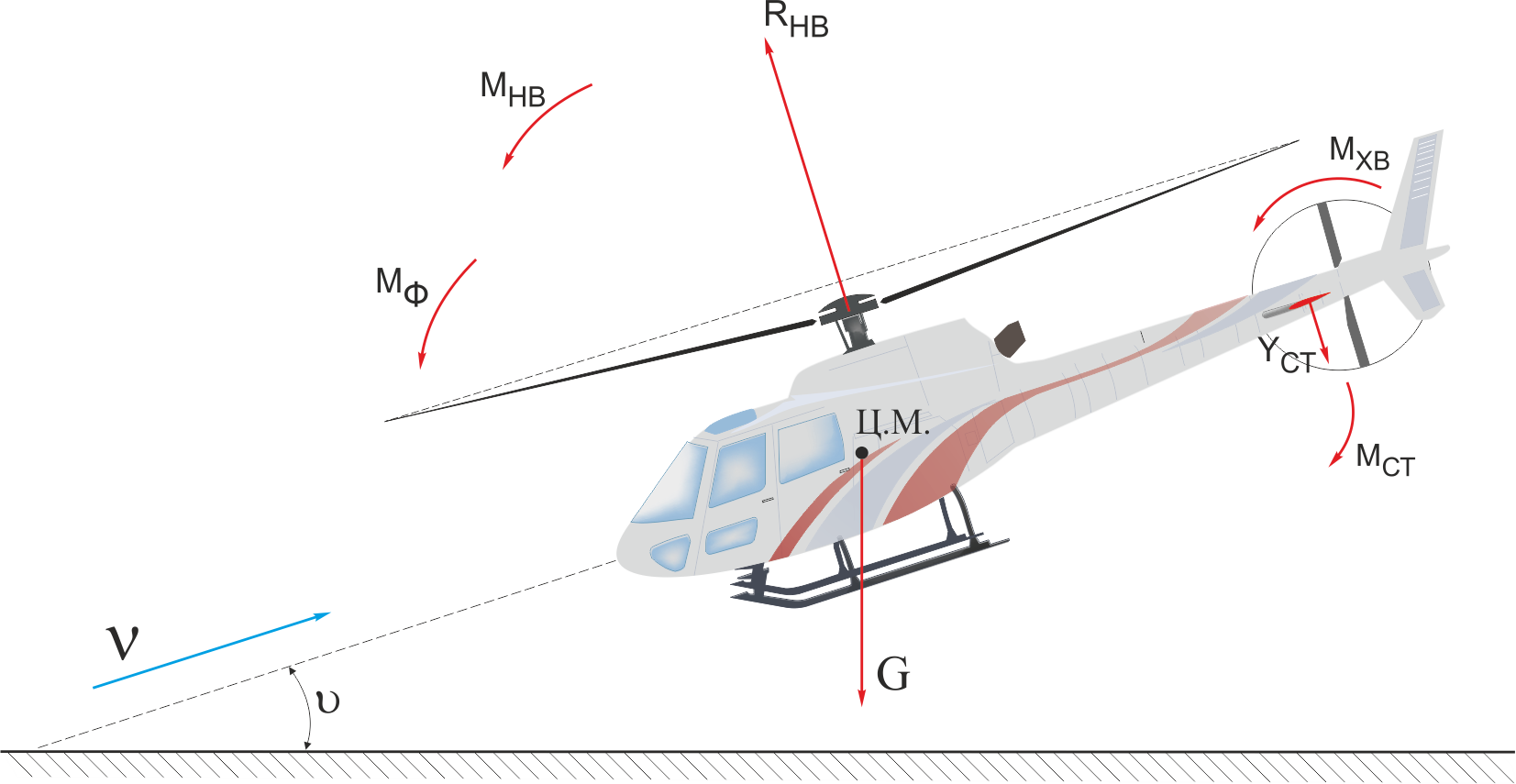
Рис.23 Продольная балансировка
Еврокоптер считается сбалансированным, если выдерживается равновесие продольных сил и моментов.
Продольными моментами еврокоптера являются (рис.23):
- от несущего винта Мzн = Rн·ХТ эф. ХТ эф - эффективная центровка.
Момент от НВ является пикирующим на моторных режимах полета и кабрирующим в полёте с неподведённой мощностью;
- момент хвостового винта Mхв. Представляет собой реактивный момент ХВ. Является пикирующим на всех режимах полета;
- момент от стабилизатора Mст=УСТ L.
1.4.14 Особенность горизонтального стабилизатора
Асимметричный профиль NACA имеет отрицательный наклон относительно горизонтальной опорной плоскости. Под воздействием воздушного потока V создается аэродинамическая сила УСТ , создающая момент Mст.
На режимах полета с работающим двигателем является кабрирующим, на режиме авторотации -пикирующим.
Условие продольного равновесия- это равенство нулю суммы продольных моментов:
![]() =
-Mzн
=
-Mzн
![]() Mст
+ Mхв
=0.
Mст
+ Mхв
=0.
При изменении момента Mzн равновесие нарушается, то есть для балансировки вертолета пилот должен с помощью РУ изменить наклон конуcа вращения НB.
Отклонение РУ кинематически связано со стационарной тарелкой автомата перекоса и зависит от скорости полета, центровки, режима работы двигателя (см. рис.21).
Примечание: Особенности путевой балансировки рассматриваются в теме 2.
Тема 2 основы аэродинамики хвостового винта
2.1 Назначение и характеристики хв
Хвостовой винт еврокоптера предназначен для уравновешивания реактивного момента НВ, обеспечения путевой управляемости и устойчивости. Вращение ХВ осуществляется от двигателя через главную и хвостовую механическую трансмиссию (рис.24).
Р ис.24 Механическая трансмиссия
Хвостовой винт — гибкий винт качающегося типа. Он изготовлен из композитных материалов. В этом винте не используются традиционные шарниры шага и взмаха. Хвостовой винт демонстрирует все преимущества, которые имеет основной- несущий винт: полное отсутствие техобслуживания, безотказная конструкция.
Хвостовой винт еврокоптера AS350 B2 имеет следующие характеристики:
тип: толкающий;
направление вращения: против часовой стрелки, если смотреть на винт с правой стороны;
диаметр рулевого винта dрв=1,86м;
ометаемая площадь Fрв=2,72м2;
двухлопастной, качающегося типа, с лонжеронами из пучков стекловолокна, без шарнира, без системы смазки.
изменение шага: посредством скручивания лонжерона;
форма лопасти прямоугольная;
профиль лопасти симметричный NACA, толщина 12%;
диапазон изменения углов установки лопастей jхв от −80 до +230;
начальное скручивание составляет угол 100;
номинальная частота вращения nхв=2086 об/мин.
Углы установки изменяются с помощью педалей;