

Функциональные динамические свойства втулки винта
Втулка STARFLEX сравнима с шарнирным винтом; обеспечивается упругий возврат в направлениях взмаха и лобового сопротивления (оконечности звезды и эластомерные подушки действуют как пружины).
Функция "Взмах лопасти":
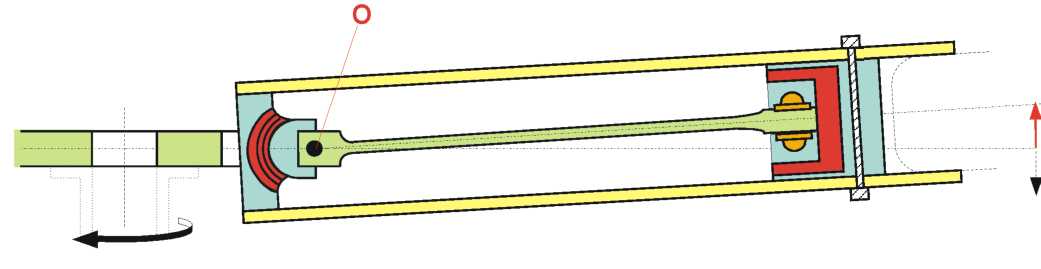
Ответвления звезды втулки упруги в направлении взмаха. Под воздействием усилия взмаха они деформируются вверх и вниз, обеспечивая взмах узла "лопасть-муфта" вокруг центра О сферического слоистого упора. (Эластичная деформация упора).
Функция "Лобовое сопротивление":
О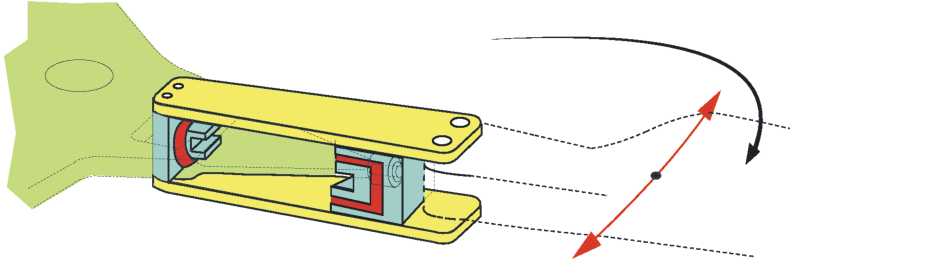 тветвления
звезды втулки жестки в направлении
лобового сопротивления.
тветвления
звезды втулки жестки в направлении
лобового сопротивления.
П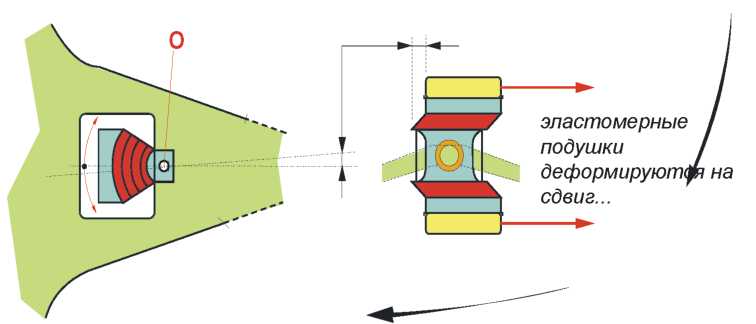 од
воздействием лобового сопротивления
агрегат «лопасть-муфта» приводится во
вращательное движение вокруг центра О
слоистого сферическрго упора. Эластомерные
подушки одновременно обеспечивают
амортизацию, которая ограничивает
амплитуду колебаний.
од
воздействием лобового сопротивления
агрегат «лопасть-муфта» приводится во
вращательное движение вокруг центра О
слоистого сферическрго упора. Эластомерные
подушки одновременно обеспечивают
амортизацию, которая ограничивает
амплитуду колебаний.
В то же время качания лопастей в плоскости вращения могут способствовать возникновению земного резонанса ( рис. )
1.4.10 Наземный резонанс
Когда вертолет находится в полете, винты, двигатель и трансмиссии являются источниками вибрации, которые передаются на конструкцию; каждый элемент имеет собственную частоту вибрации
Производитель постарался уменьшить уровень вибраций путем согласования индивидуальных частот элементов конструкции вертолета. В полете, когда вертолет находится в автономном режиме, уровень вибраций всегда стабилизируется: он не растет и не уменьшается.
Наоборот, когда вертолет находится на земле с вращающимся винтом, вибрации находят точку опоры в виде шасси.
Если собственная частота вибраций шасси сближается с частотой вибраций несущего винта, при каждом обороте лопастей вибрации усиливаются, получая новый импульс. Амплитуда вибраций быстро увеличивается. Эти увеличивающиеся вибрации и соответствующие колебания могут привести к разрушению и опрокидыванию вертолета. ЭТО — ЯВЛЕНИЕ НАЗЕМНОГО РЕЗОНАНСА.
Гибкая стальная пластина, прижатая книзу, удлиняет заднюю часть лыж. увеличивая гибкость шасси и распределяя собственную частоту узла таким образом, чтобы не возникало явления наземного резонанса.
Кроме того, между гибкой передней опорой шасси и конструкцией находятся амортизаторы, которые обеспечивают гашение вибраций и предотвращают нарастание колебаний (рис.19,а ).
Гибкие поперечины, лыжи и их стальные пластины позволяют смягчить вертикальную потерю скорости вертолетом в момент посадки. Энергия удара поглощается амортизаторами. а также лыжами, которые соприкасаются с землей
Р ис. 19,а Действие амортизаторов шасси
1.4.11 Управление несущим винтом
Продольно-поперечное управление вертолетом осуществляется путем изменения направления и величины аэродинамической силы НВ Rн.
Цель управления – изменение в полёте углов крена и тангажа, продольной Vх и боковой Vz скоростей вертолета.
Осуществляется путем наклона конуса вращения НВ с помощью ручки управления (РУ), кинематически связанной со стационарной тарелкой автомата перекоса и тягами управления углами установки лопастей (Рис.20):
При нейтральном положении тарелки автомата перекоса углы установки лопастей сохраняются постоянными при их движении по азимуту .
При наклоне тарелки автомата перекоса углы установки лопастей начнут изменяться по азимуту (рис.20):
Через каждый оборот НВ изменение углов установки лопастей циклически повторяется («циклическое» изменение шага ).
Изменяется характер маховых движений лопастей. Происходит управляемый наклон конуса вращения, а вместе с ним наклоняется в ту же сторону вектор аэродинамической силы НВ (Рис.17).
Величина аэродинамической силы изменяется при помощи рычага шаг-газ. Перемещение рычага шаг-газ передаётся на механизм перемещения тарелки автомата- перекоса вверх или вниз. При этом все лопасти НВ скручиваются на одинаковый угол поворота.
Рис.20
Циклическое изменение углов установки
лопастей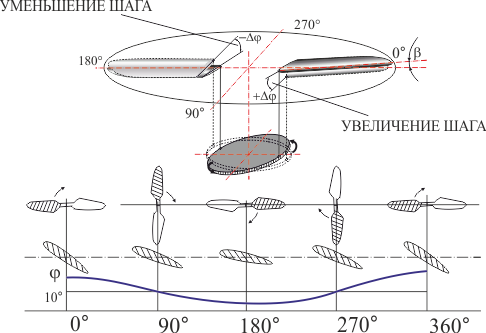
На упрощенной схеме каналов управления можно увидеть результат воздействия на ручку продольно поперечного управления и рычаг "шаг-газ"
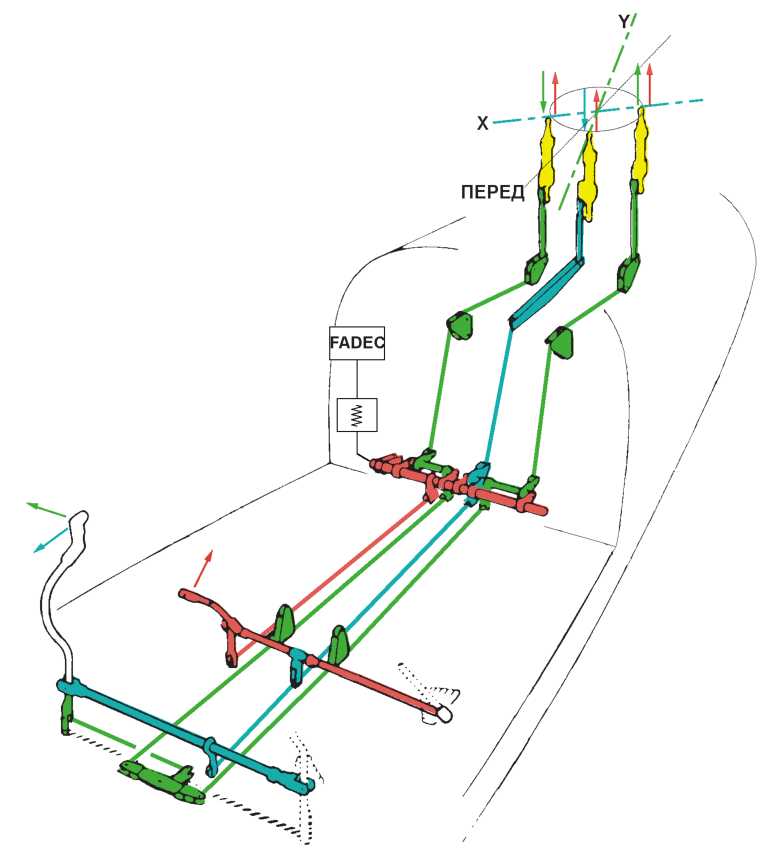
Органы управления несущим винтом (рис.21)
Каналы управления, которые связывают ручку продольно-поперечного управления (10), рычаг "шаг-газ" (11) и тарелку автомата перекоса (1), представляют собой жесткие тяги, связанные между собой посредством угловых рычагов и рычагов реверсирования.
На каждом из каналов управления, которые оканчиваются тарелкой автомата перекоса, необходимое для управления усилие обеспечивается с помощью гидравлического сервопривода (2-3-15). В базовой модификации вертолет имеет одинарное управление без автопилота.
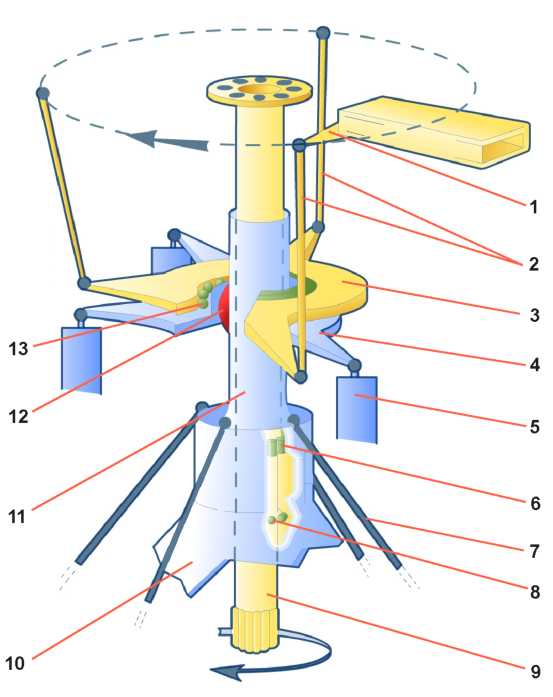
МАЧТА несущего винта (рис.21а) включает в себя:
-вал несущего винта (9), приводимый главным редуктором;
-тарелку автомата перекоса: вращающуюся (3) и стационарную (4).
![]()
а) б)
Рис.21 Мачта несущего винта. Органы управления несущим винтом.
Стационарная тарелка приводится в действие органами управления полетом (5) в трёх точках под углом 90°. Благодаря монтажу на шарнире (12) она может колебаться вокруг цилиндра (цикличное изменение шага); смещаться по длине мачты (изменение общего шага). В этом случае шарнир скользит по направляющей (11).
Вращающаяся тарелка на подшипнике (13) повторяет все движения стационарной тарелки и передает их на рычаги общего шага (1) муфт для лопастей посредством трёх тяг изменения шага (2).
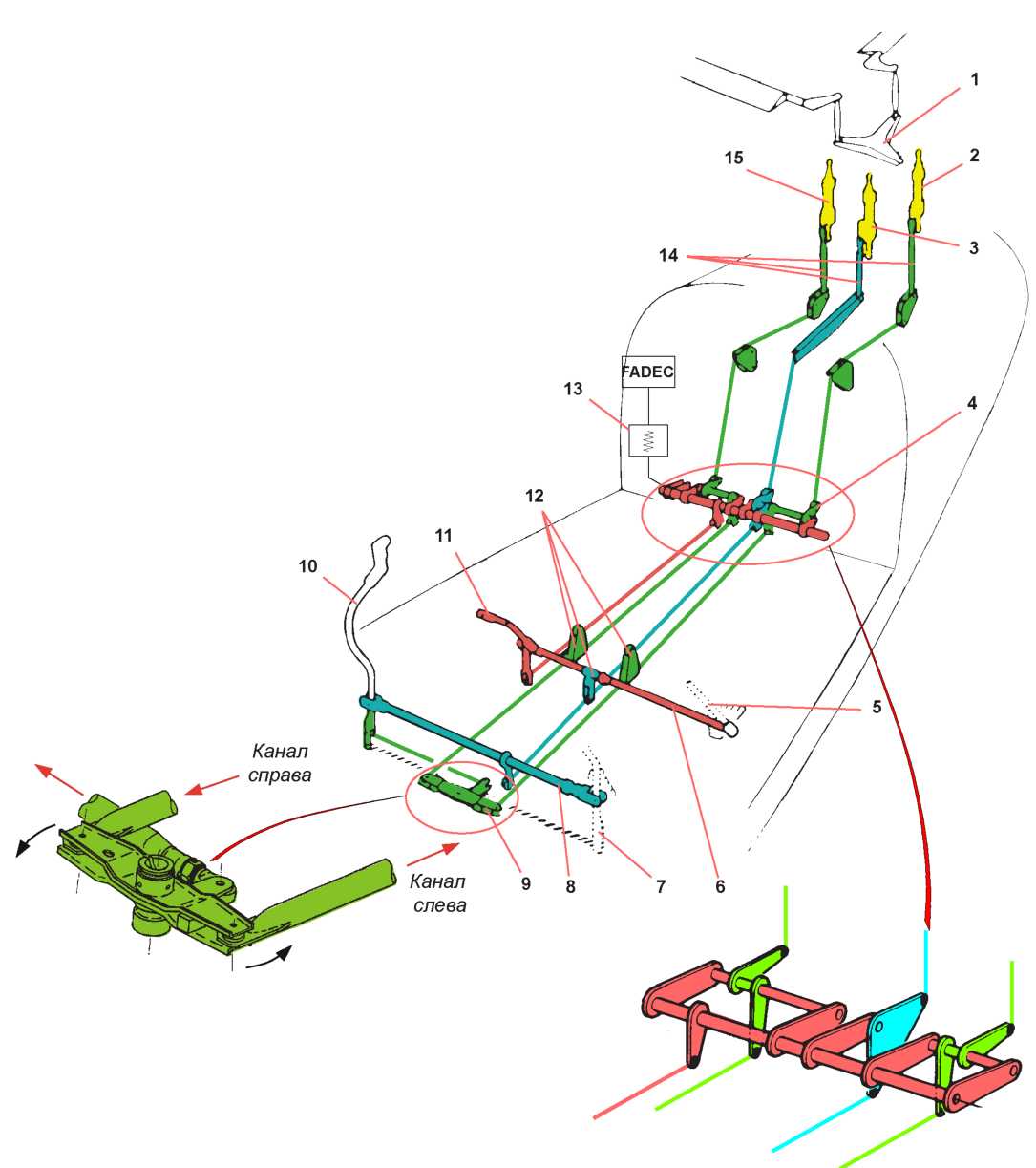
Рис.21-б Работа группового переключателя
1 - Тарелка автомата перекоса
2 - Сервопривод крена (Л)
3 - Сервопривод тангажа
4 - Групповой переключатель
5 - Рычаг "шаг-газ" второго пилота, быстродемонтируемый (при двойном управлении)
6 - Вал соединения рычагов "шаг-газ"
7 - Ручка продольно-поперечного управления, быстродемонтируемая
8 - Вал соединения ручек продольно-поперечного управления
9 - Поперечный угловой рычаг
10 - Ручка продольно-поперечного управления пилота
11 - Рычаг "шаг-газ" пилота-12-Точки реверсирования каналов циклического шага
13 - Соединение "общий шаг — регулировка двигателя " (см. главу 14); потенциометр позиционирования 28К2
14 - Тяги воздействия сервоприводов
15 - Сервопривод крена (П)
Групповой переключатель представляет собой орган, в котором пересекаются органы управления автоматом перекоса и общим шагом. Он обеспечивает независимое функционирование этих органов управления без взаимодействия между собой. То есть изменение общего шага не влияет на наклон тарелки автомата перекоса (продольно-поперечное управление не задействуется), а перемещение ручки продольно-поперечного управления не изменяет общий шаг (автомат перекоса наклоняется, но остается на той же высоте).
ПРИМЕРЫ
( 1 ) Поперечное воздействие ручки продольнопоперечного управления
Если ручка смещается вправо, каналы крена смещаются в противоположном направлении на такое же значение и обеспечивают наклон тарелки автомата перекоса вправо вокруг оси Y, которая проходит через сервопривод тангажа.
( 2 ) Продольное воздействие ручки продольнопоперечного управления
При перемещении ручки вперед, канал тангажа наклоняет тарелку автомата перекоса вперед вокруг оси X, которая проходит через 2 сервопривода крена.
( 3 ) Воздействие рычага "шаг-газ"(рис.21-б)
Если потянуть рычаг "шаг-газ" вверх (в направлении увеличения шага), каналы крена и тангажа с помощью группового переключателя осуществляют перемещение на одинаковое расстояние в том же направлении. Тарелка автомата перекоса смещается вверх, параллельно самой себе. При этом все лопасти НВ скручиваются на одинаковый угол поворота.