

1.4.8 Конус вращения несущего винта
При своём вращении лопасти НВ, закреплённые на полужёсткой втулке, приподняты над плоскостью вращении(КПВ), образуют геометрическую фигуру - конус вращения.
При осевом обтекании лопасти образуют правильный конус. Ось конуса вращения совпадает с конструктивной осью вращения НВ. Равнодействующая несущего винтаRН проходит вдоль оси вращения НВ (рис.17).
Р ис.17 Конус вращения несущего винта
При косом обтекании лопасти имеют различное положение над плоскостью втулки НВ( см. рис.15).
Под влиянием косого обтекания лопасти образуют так называемый заваленный конус вращения, у которого образующие - лопасти, расположены под разными углами относительно плоскости вращения.
В продольной плоскости (по потоку) конус вращения отклоняется на угол α1 в поперечной плоскости - на угол в1.
Завал конуса вращения может быть естественный (самопроизвольный), вызываемый действием встречного потока, и управляемый, вызываемый циклическим изменением углов установки лопастей (циклического шага) при отклонениях тарелки автомата перекоса в процессе управления вертолетом.
При
наклоне конуса вращения назад и вбок
в
ту же сторону
изменяется положение равнодействующей
силы НВ
![]() (рис.17),
которое приводит к изменению моментов
тангажа и рыскания.
(рис.17),
которое приводит к изменению моментов
тангажа и рыскания.
Факторами, влияющими на величину завала конуса вращения НВ, являются: скорость поступательного движения, действие ветра, шаг НВ, обороты НВ.
1.4.9 Работа лопастей в плоскости вращения нв
В плоскости вращения НВ каждая лопасть находится под действием сил: сопротивления вращению Хл, действующих на плече 0,7 rн и направленных против вращения НВ; центробежных сил Fцб, действующих в радиальном направлении перпендикулярно оси вращения НВ (Рис.18).
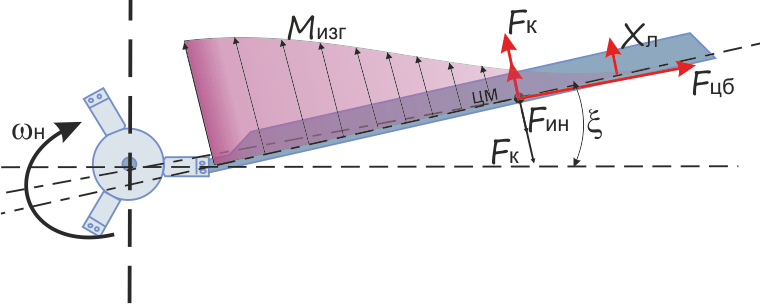
Рис.18 Силы, действующие в плоскости вращения
Силы сопротивления создают моменты изгиба, действующие на конструкцию лопасти и втулки. Максимальный изгибающий момент воспринимает втулка НВ (рис.18 ).
При косом обтекании НВ силы сопротивления лопастей изменяются по азимуту в зависимости от эффективной скорости, поэтому их изгибающие моменты также изменяются по азимуту.
Центробежные силы нагружают лопасть вдоль её оси.
При поворотах лопастей в плоскости тяги (маховых колебаниях) каждая лопасть находится одновременно в двух движениях– окружном и маховом. При наложении этих двух движений на лопасть начинает действовать дополнительная сила инерции − Кориолиса.
Причину возникновения сил Кориолиса можно объяснить, используя закон сохранения энергии (Рис.19):
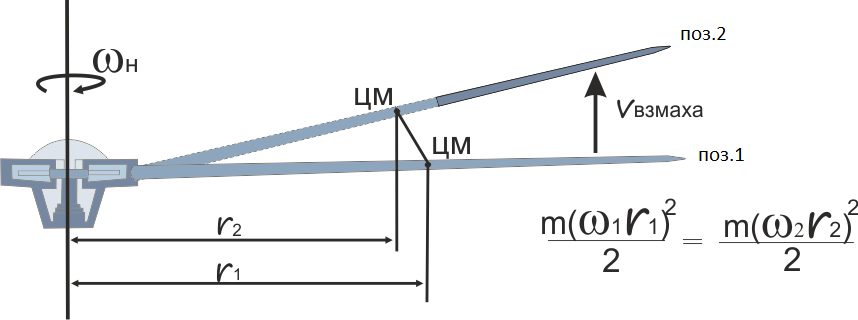
Рис.19 К возникновению сил Кориолиса
При поворотах лопасти вверх или вниз (маховых колебаниях) кинетическая энергия лопасти сохраняется постоянной при любом положении относительно плоскости вращения:
m(1r1)2 = m(2r2)2

 2
2
2
2
Здесь:
m – масса лопасти;
r1 и r2 – расстояние от центра масс лопасти до оси вращения НВ до и после взмаха (положения 1 и 2);
1и 2 — угловые скорости вращения лопасти, соответствующие положениям
1 и 2.
При повороте лопасти вверх её центр масс приближается к оси вращения НВ, уменьшается радиус r, лопасть стремится уменьшить окружную скорость вращения. Сила Кориолиса увеличивается и действует на раскрутку лопасти, чтобы сохранить запас энергии.
При повороте лопасти вниз из положения 2 в положение 1 радиус r увеличивается, лопасть стремится увеличить окружную скорость. Возникающая сила Кориолиса препятствует ускорению вращения и направлена на торможение лопасти.
Силы Кориолиса создают моменты изгиба, изменяющиеся по величине и по направлению. Они дополнительно нагружают лопасть и втулку в плоскости вращения (рис.18).
На еврокоптере, благодаря использованию эластомерных сферических подшипников, применению упругих элементов конструкции лопастей и втулки несущая система способна длительно работать, несмотря на воздействие больших нагрузок в полёте.
Вывод: Благодаря креплению лопастей к втулке при помощи упругих элементов они совершают маховые движения (функция «взмах лопасти») в плоскости тяги и колебания в плоскости вращения (функция «лобовое сопротивление»).
НВ с полужесткой втулкой имеет преимущества: моменты изгиба на втулку не передаются, конструкция облегчается, повышается ресурс работы несущей системы.