

Втулка несущего винта
ВТУЛКА ВИНТА "STARFLEX"
Звезда (STAR) с 3 гибкими на взмах ответвлениями (FLEX) — опорный элемент несущего винта (отсюда название STARFLEX).
Втулка STARFLEX предназначена для удержания лопастей на ответвлениях звезды посредством жестких муфт БЕЗ ПОДШИПНИКОВ, которые обеспечивают функции:
взмах лопасти;
лобовое сопротивление;
изменение шага.
Муфта также должна передавать центробежные усилия с лопасти на центральную жесткую часть звезды. Для этого между муфтами (3) и ответвлением звезды (2) расположены упругие соединения:
слоистый сферический упор (слои тонких стальных и эластомерных пластин) и эластомерные подушки - "адаптеры частоты".

1.4.5 Движения лопастей в плоскости действия тяги
Рассмотрим движение лопасти в плоскости действия тяги (Рис.13). При вращении лопасти на нее действуют следующие силы:
- подъемная сила Уал. Приложена в центре давления на расстоянии а от втулки;
- сила тяжести Gл. Приложена в центре масс лопасти на расстоянии в от втулки;
- центробежная сила Fцб. Приложена в центре масс лопасти на расстоянии С от втулки.
Действуя
на своем плече, каждая сила создает
моменты относительно относительно
точки закрепления к втулке. Воздействуя
на торсионы, моменты сил с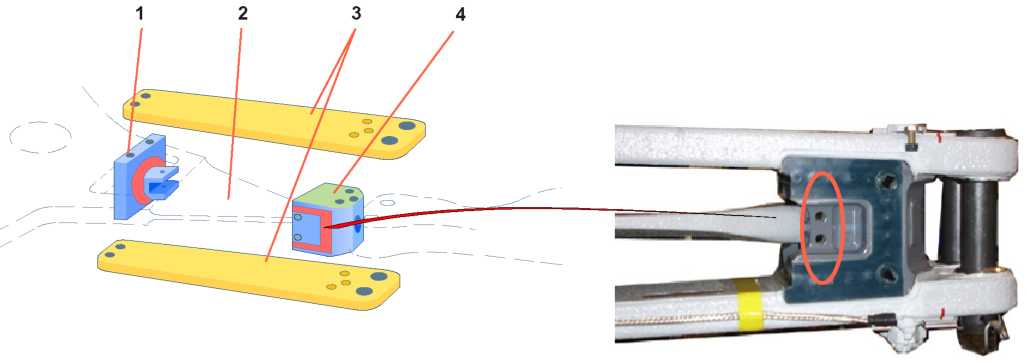 оздают
упругий изгиб каждой лопасти и поднимают
лопасти относительно плоскости вращения
НВ на угол
βл
(Рис.13).
оздают
упругий изгиб каждой лопасти и поднимают
лопасти относительно плоскости вращения
НВ на угол
βл
(Рис.13).
Если при вращении НВ углы βл не изменяются, лопасть будет находиться в состоянии равновесия относительно плоскости вращения в любом взимуте.
Условием равновесия лопасти относительно точки её закрепления к втулке является равенство нулю алгебраической суммы моментов, действующих на лопасть:
М=Му - МG-Мцб=0.
Состояние равновесия лопастей, при одинаковых углах взмаха в любом азимуте возможно только в случае работы НВ на режиме осевого обтекания.
Р ис.13 Схема равновесия лопасти
1.4.6 Маховые движения лопастей
При переходе НВ к режиму косой обдувки равновесие лопастей от азимута к азимуту непрерывно нарушается, так как углы атаки и подъемные силы лопастей непрерывно изменяются по азимуту, согласно зависимостям, представленным на графиках рис.14,а, 14,б:
а) б)
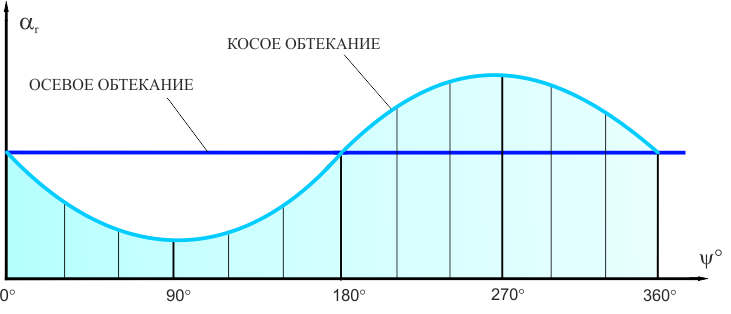
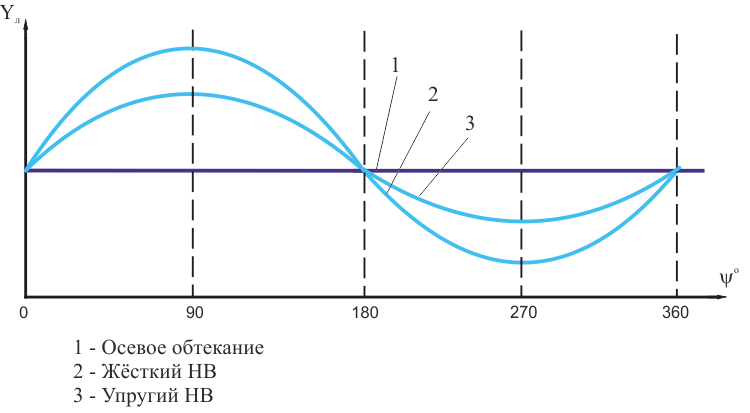
Рис.14 Изменение углов атаки и подъёмных сил лопастей по азимуту
В этом случае лопасти ,связанные с втулкой через упругие элементы муфты, начинают непрерывно прогибаться в плоскости действия тяги, изменять своё положение относительно плоскости вращения НВ .
Положение лопастей над КПВ характеризуется величиной угла взмаха βл.. Непрерывные изменения углов взмаха при поворотах лопастей из-за деформаций упругих элементов муфт втулки представляют собой маховые движения лопастей.
1.4.7 Изменение углов взмаха по азимуту
На величину углов взмаха оказывают влияние: массовые характеристики лопастей, скорости обтекания, углы установки лопастей (шаг винта), углы атаки, частота вращения НВ отклонение органов продольно-поперечного управления.
Важную роль в работе несущего винта и динамике движения еврокоптера играет распределение углов взмаха, если изменяются углы азимутального положения лопастей Ψ, а несущий винт работает на режиме косого обтекания.
При изменении угла азимута лопасти Ψ от 0 до 90о вследствие увеличения скорости обтекания наблюдается увеличение угла взмаха лопасти. В азимуте 900 лопасть имеет максимальный прирост подъёмной силы и уменьшение угла атаки за счёт взмаха (Рис.14,а).
При движении от Ψ = 900 до180о появляется сила инерции лопасти, препятствующая уменьшению угла взмаха. Из-за подъёма лопасти на неё действует дополнительный прирост подъёмной силы. В этом азимутальном секторе лопасть имеет максимальный угол взмаха, то есть подъём над плоскостью вращения НВ.
Ψ = 180÷360о. В этом секторе вследствие уменьшения скорости обтекания лопасть получает отрицательный прирост подъёмной силы, но после прохождения азимута 2700 лопасть продолжает опускаться, несмотря на увеличение эффективной скорости обтекания, Этому способствует сила инерции лопасти, которая препятствует увеличению взмаха лопасти.
Таким образом, упругие деформации– маховые движения лопастей совершаются под влиянием нескольких факторов: изменения скоростей обтекания, действия инерционных сил, изменения углов атаки лопастей.
С каждым оборотом несущего винта изменения углов взмаха циклически повторяются .
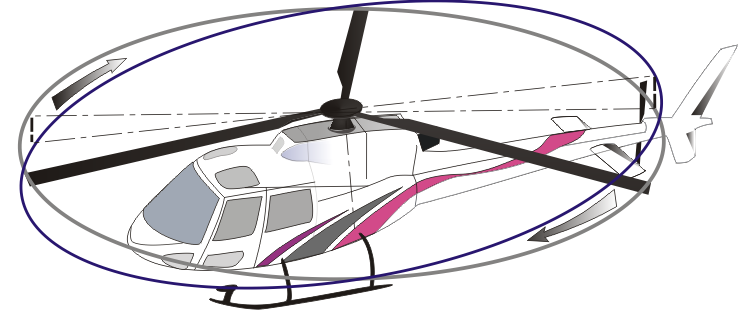
Рис.15 Распределение углов взмаха лопастей НВ
Равновесие лопасти достигается лишь в двух азимутальных положениях, соответствующих максимальному (βmax) и минимальному (βmin) углам взмаха (Рис.15):
На величину углов взмаха лопастей оказывают влияние: скорость поступательного движения шаг НВ, обороты НВ; аэродинамическое демпфирование лопастей, циклический шаг лопастей, масса лопастей.
Аэродинамическое демпфирование - это изменение подъёмной силы лопасти, препятствующее изменению взмаха. Происходит вследствие изменения углов атаки в процессе взмахов лопастей, как это показано для двух азимутов:
Ψ = 900(поднимающаяся лопасть) и Ψ =2700(опускающаяся лопасть), рис.16:

Рис.16 Аэродинамическое демпфирование
То есть демпфирование – это естественное гашение маховых колебаний лопастей.
Примечание: Из-за увеличения углов атаки на отступающих лопастях при определенных условиях на концах лопастей в азимуте 270° возникает явление срыва потока.
Рис.16 Развитие срыва потока на лопасти