

1.4.2 Угол атаки элемента лопасти
Обтекание элементов лопасти имеет пространственный характер, так как на них воздействуют два потока: осевой и эффективный.
Осевой поток Vос включает в себя: индуктивный поток Vi; поток от вертикальных перемещений ЛА Vy; от изменения угла атаки НВ Vosinн; от маховых колебаний лопастей и др.:
Vос= Vi+ Vy+ Vosinн; Vэф=нr+ Vosin .
Скорость суммарного воздушного потока называется результирующей скоростью:
W =Vос +Vэф.
Для каждого элемента лопасти результирующие скорости обтекания изменяются в зависимости от режима полета. При этом изменяется и направление вектора скорости результирующего потока элемента W.
На рис.9 изображено построение угла атаки и аэродинамические силы элемента лопасти для режима осевого обтекания НВ:
Углом атаки элемента лопасти r называется угол, заключенный между вектором скорости результирующего потока и хордой профиля элемента (рис.9 ). Определяется по формуле: r =r- r. Здесь
r - угол установки элемента;
r - угол притекания элемента, то есть угол, под которым результирующий поток подходит к плоскости вращения НВ (КПВ).
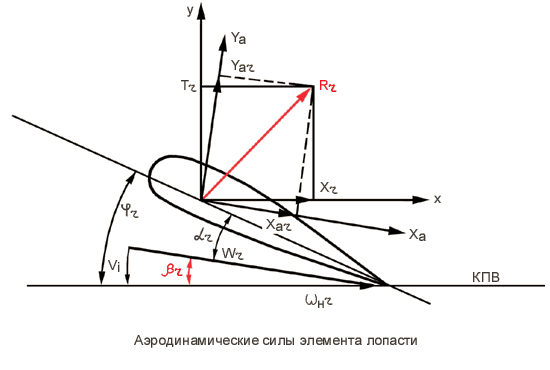
Рис.9 Угол атаки и аэродинамические силы элемента лопасти
Из формулы следует, что углы атаки элементов лопасти могут изменяться под влиянием следующих факторов: углов установки лопастей (то есть шага НВ), углов притекания, которые, в свою очередь, зависят от:
изменения угла атаки НВ ( режима работы НВ),
числа оборотов НВ,
поступательной скорости еврокоптера,
вертикальных перемещений ЛА,
маховых колебаний лопастей,
перемещения рычагов управления ( ручки управления, рычага общего шага) и др.
При перемещении рычагов управления пилот изменяет углы установки лопастей, а также углы атаки НВ, тем самым воздействуя на углы атаки элементов лопасти. В зависимости от углов атаки на лопастях изменяется величина аэродинамических сил .
1.4.3 Аэродинамические силы элемента лопасти
Каждый элемент лопасти находится под углом атаки к результирующему потоку. Из-за несимметричного обтекания профиля элемента возникает полная аэродинамическая сила Rr (рис.9 ).
Проекциями силы Rr на связанные оси координат Ох и Оу являются сила тяги элемента Тr и сила сопротивления вращению Хr. Проекциями силы Rr на скоростные оси являются подъёмная сила элемента Уar и сила лобового сопротивления Хar.
На режимах с поступательной скоростью отличия тяги и подъемной силы незначительны, в то время как силы Хar и Хr могут существенно отличаться по значению и по направлению.
Разложение полной аэродинамической силы элемента лопасти на составляющие позволяет исследовать работу несущего винта лопастей в плоскости тяги и в плоскости вращения НВ.
Просуммировав силы тяги всех лопастей, можно найти силу тяги НВ(Рис.10):
ТН= КЛ ТЛ , ТЛ=ТЭЛ,
где ТЛ– тяга лопасти;
ТЭ Л–тяга элемента лопасти;
Кл=3- число лопастей НВ.
Р ис.10 Распределение тяг лопастей при осевом обтекании
Расчет тяги производится по формуле основного закона сопротивления воздуха (см. раздел «Основы аэродинамики ЛА»):
Тн=0,5СТ (н rн)2Fн,
СТ - коэффициент тяги НВ. Определяется опытным путем с помощью продувок НВ в аэродинамической трубе и графически снимается с помощью поляры НВ для еврокоптера;
н rн= 218м/сек - окружная скорость концевого элемента лопасти;
Fн=89,75м2 - ометаемая площадь НВ.
Факторами, влияющими на тягу НВ, являются:
геометрические характеристики НВ,
шаг НВ,
число оборотов НВ,
положение рычага управления двигателем;
скорость полёта (ветра).
плотность воздуха.
В плоскости вращения на каждую лопасть НВ действуют силы сопротивления вращению ХН, которые определяются суммированием сил сопротивления элементов лопастей: Хн = Хл ∙Кл, , ХЛ= ХЭЛ.
Центры давления лопастей находятся на удалении 0,7RН относительно оси вращения НВ, поэтому создают момент сопротивления вращению (рис.11 ).
Момент определяется по формуле:
Мкр=0,5mкр(н rн)2FнRн.
mкр - коэффициент крутящего момента НВ. Снимается с поляры НВ.
Увеличение углов установки лопастей НВ сопровождается увеличением mкр и момента сопротивления Мкр НВ.
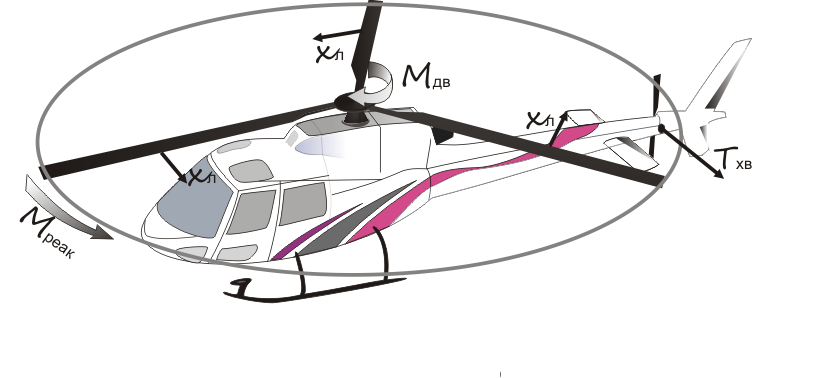
Рис.11 Схема образования реактивного момента НВ
Если геометрия НВ задана, обороты НВ поддерживаются постоянными, тяга и крутящий момент зависят от атмосферных условий, угла атаки и шага НВ.
Для увеличения тяги НВ пилот увеличивает шаг НВ, но при этом растет момент сопротивления вращению НВ. Для сохранения неизменных оборотов НВ необходимо увеличить мощность двигателя, так как должно выдерживаться равенство: МН=Мдв=7030Ne/nн,
Ne=531квт -эффективная мощность двигателя ARIEL,
nн=386 об/мин- частота вращения НВ.
Мдв- крутящий момент на валу свободной турбины.
Вследствие подвода к несущему винту крутящего момента, который преодолевает сопротивление лопастей, на вертолёт передаётся так называемый реактивный момент.
Реактивный момент действует в сторону, противоположную крутящему моменту двигателя и равен ему по величине. Следовательно, реактивный момент стремится развернуть еврокоптер влево, то есть против вращения несущего винта (Рис. 11).