

2.4 Боковая балансировка еврокоптера
Целью боковой балансировки еврокоптера является сохранение равновесия сил и моментов, действующих относительно нормальной оси 0у и продольной оси Оx.
а) б)
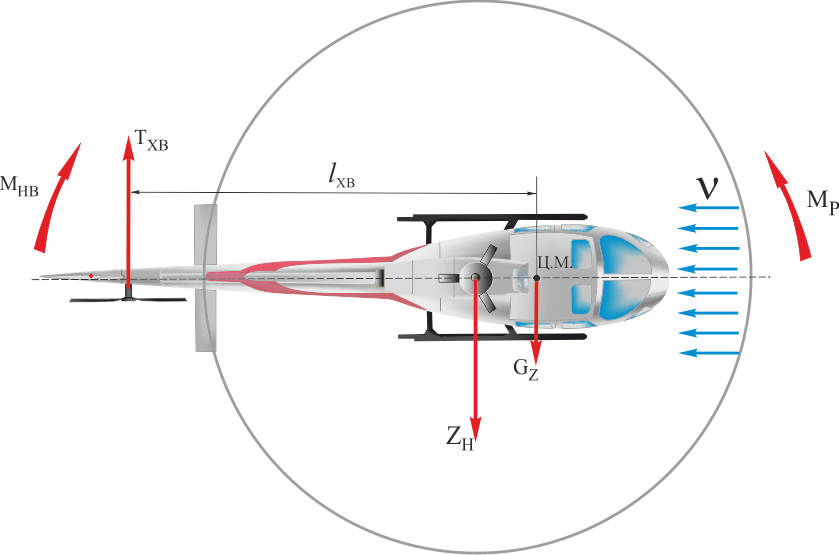
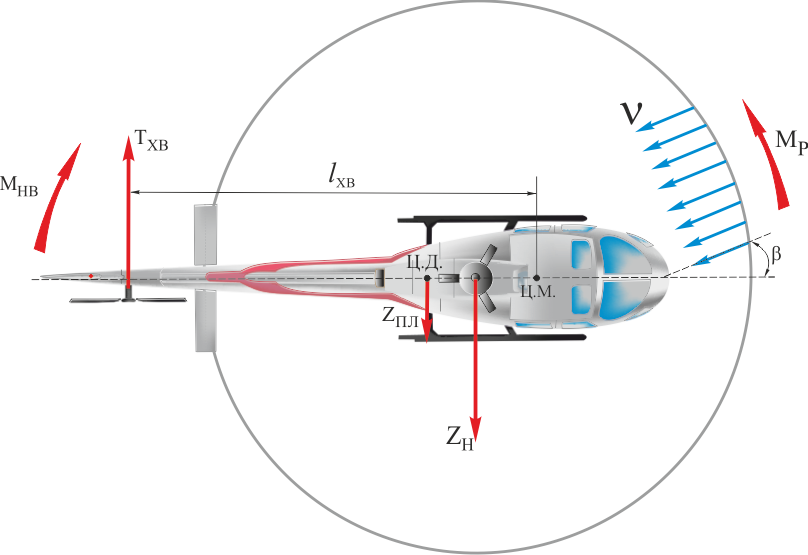
Рис.31 Способы путевой балансировки
На еврокоптер относительно оси Оу действуют следующие моменты рыскания (рис.31):
реактивный момент несущего винта МНВ. Он образуется из-за действия крутящего момента двигателя, подводимого к НВ для преодоления сил сопротивления вращению лопастей НВ, и направлен против вращения НB. Он передается со стороны втулки на корпус вертолёта, стремится развернуть вертолет влево;
момент от тяги хвостового винта МХВ =ТХВ LХВ. Действует на плече LХВ за счет выноса ХВ относительно центра масс вертолета. Стремится развернуть вертолет вправо.
На режиме полёта с не подведённой мощностью (самовращении НВ) под действием крутящего момента НВ еврокоптер разворачивается вправо. Поэтому ХB переводится на отрицательные углы установки и момент МХВ имеет противоположное направление, т.e. разворачивает вертолет влево;
момент рыскания от боковой силы планера Мпл Возникает в полете со скольжением (рис.31,б).. В этом случае центр давления фюзеляжа находится позади центра масс вертолета на расстоянии LФ.
На моторных режимах полета боковая сила планера Z пл направлена вправо по полету и момент МУФ действует влево. На режиме самовращения МУФ действует вправо. Следовательно, на любом режиме полета момент рыскания планера М пл совпадает по направлению с реактивным (крутящим на РСНВ) моментом НВ.
Вертолет находится в состоянии путевого равновесия, если алгебраические суммы поперечных сил и их моментов относительно нормальной оси ОУ равны нулю (см. рис.31).
В поперечной плоскости относительно оси Оx на действуют следующие силы и моменты (Рис.32):
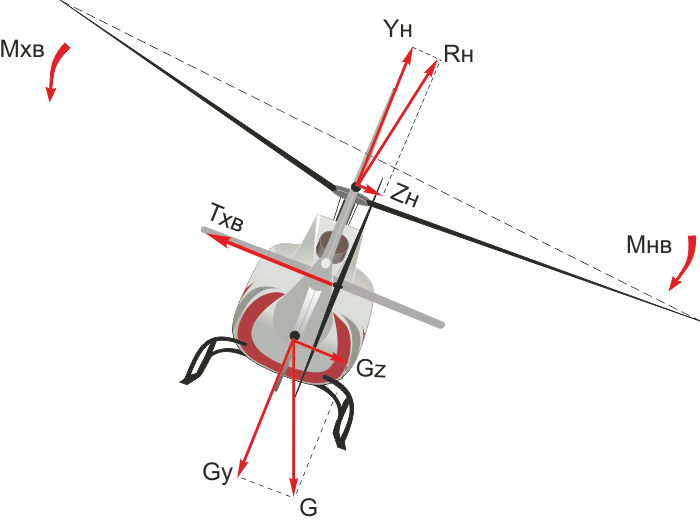
Рис. 32 Поперечная балансировка еврокоптера
- сила тяги хвостового винта ТХВ. На моторных режимах направлена влево по полету, на режиме самовращения НВ - вправо;
- поперечная сила несущего винта Zн. Представляет собой проекцию силы Rн на поперечную ось 0z. Направлена вправо на моторных режимах и влево - на режиме самовращения НВ. Возникает вследствие бокового завала конуса вращения НВ, вызванного поступательным движением еврокоптера;
- поперечная сила планера Z пл. Появляется при наличии скольжения еврокоптера в случае балансировки без крена(рис.31б);
- кренящий момент oт несущего винта Мхн. Возникает под действием поперечной силы Zн на плече yн относительно продольной оси 0х. Момент Мхн стремится накренить еврокоптер вправо на моторных режимах и влево - на режиме самовращения НВ;
- кренящий момент от тяги хвостового винта Мхв. Действует на плече hХВ относительно оси 0х, стремится накренить еврокоптер влево на моторных режимах и вправо - на режиме самовращения НВ.
Еврокоптер находится в состоянии поперечного равновесия, если алгебраические суммы поперечных сил и их моментов относительно продольной оси 0x равны нулю:
ΣFz = Zн+GZ –ТХВ =0,
ΣMx= Zн·yн - ТХВ hХВ=0.
Балансировка еврокоптера осуществляется поперечными отклонениями ручки управления (РУ). При этом конус вращения НВ отклоняется в балансировочное положение, при котором еврокоптер находится в положении равновесия.
Чтобы полёт выполнялся без скольжения, еврокоптер на моторных режимах полёта должен иметь небольшой правый крен, величина которого зависит от режима двигателя.
Следует учитывать, что движение еврокоптера по рысканию (относительно оси Оу) взаимосвязано с его движением по крену (относительно оси Ох).
Поэтому путевое равновесие рассматривается в сочетании с поперечным равновесием вертолета и может осуществляться двумя способами:
-с креном без скольжения (рис.31,а) и без крена со скольжением (рис.31,б).
В зависимости от этого условия равновесия сил и моментов имеют следующий вид:
Балансировка без скольжения Балансировка со скольжением
ΣFZ=Zн+Gz - ТХВ=0, ΣFZ=Zн+Zф – ТХВ = 0 , ΣMУ=МУН
ΣMУ =МУН – MХВ =0. MФ+MХВ=0.
а) б)
В полете со скольжением (рис.31,б) тяга ХВ должна быть больше, чем для балансировки без скольжения, так как необходимо уравновесить дополнительный момент от боковой обдувки фюзеляжа МФ. Поэтому полет со скольжением выполняется с меньшими запасами путевого управления, чем без скольжения.
Путевая балансировка вертолета на заданном режиме осуществляется при определенном моменте, создаваемом тягой хвостового винта МХВ. Следовательно, при переходе на другой режим полета необходимо изменить и тягу ХВ.
Для
каждого режима полета можно определить
балансировочные углы установки лопастей
хвостового винта
![]() ХВ
в пределах допустимых значений, при
которых вертолет будет находиться в
состоянии путевого равновесия и является
управляемым.
ХВ
в пределах допустимых значений, при
которых вертолет будет находиться в
состоянии путевого равновесия и является
управляемым.
Для еврокоптера диапазон изменения углов установки лопастей хвостового винта ХВ составляет от −80 до +230.
на всех режимах моторного полета углы ХВ имеют положительное значение, т.e. требуется отклонение правой педали вперед;
с увеличением скорости полёта балансировочные углы ХВ изменяются в зависимости от потребной мощности НВ. Это объясняется тем, что если изменяется потребная мощность, значит изменяется шаг НВ и его реактивный момент;
при увеличении мощности двигателя (шага НВ) балансировочные углы ХВ должны быть больше.
При работе двигателя на предельной мощности (висение , вертикальные режимы) тяга ХВ близка к максимальной, а правая педаль отклоняется вперед и приближается к упору. Запас по путевому управлению минимальный.
в полёте с не подведённой мощностью (авторотация) ХВ переводится на отрицательные углы установки. При предельно-передних центровках требуются наибольшие отрицательные углы установки лопастей ХВ, то есть ограничивается запас по отклонению левой педали.
Следует помнить: при нарушении установленных ограничений по скорости бокового ветра, массе вертолета, оборотам НВ потребные углы установки лопастей ХВ могут быть больше максимально допустимых, установленных в РЛЭ еврокоптера. В этом случае возможна нехватка полного хода правой педали –еврокоптер становится неуправляемым и разворачивается влево.
Выводы:
1. Боковое движение еврокоптера состоит из двух связанных между собой движений: по крену и рысканию;
2. В состоянии бокового равновесия сохраняется равенство между собой сил, а также их моментов, действующих в поперечной и горизонтальной плоскостях;
3. Боковая балансировка еврокоптера осуществляется с помощью отклонений РУ и педалей.
4. С помощью расчётов определяются запасы поперечного и путевого управления еврокоптера на различных режимах полета.
5. На боковую балансировку вертолета основное влияние оказывает работа хвостового винта. Знание особенностей аэродинамики ХВ объясняет физический смысл летных ограничений еврокоптера.