

2.5. Словарь терминов и определений в счпу
PLC: Programmable Logic Controllers – программируемый логический контроллер.
MAP: Manufacturing Automation Protocol – промышленный автоматизированный протокол.
Цикловое управление – движение от упора до упора.
Позиционное управление – движение от точки к точке без требований к траектории движения.
Контурное управление – движение от точки к точке по заданной траектории.
Интерполятор – вычислительное устройство, предоставляющее расчет и выдачу управляющих сигналов по нескольким осям с квантованием по уровню и по времени, обеспечивающее при этом заданную траекторию движения.
Линейная интерполяция – расчет перемещений по осям при общем движении по прямой.
Круговая интерполяция – расчет перемещений по осям при общем движении по окружности.
Абсолютные координаты – координаты движения рабочего органа, которые определены относительно базовой (нулевой) точки станка.
Относительные координаты (в приращениях) – координаты движения рабочего органа, которые определены относительно предыдущей опорной точки.
Разрешающая способность – наименьшее задание управления (перемещения, температуры и т.д.).
Базовая нулевая точка системы координат СЧПУ – начало отсчета по координатным осям конкретного станка, робота и т.д.
Фиксированная точка (точка нулирования) – исходная точка рабочего органа, определенная относительно базовой точки, служащая для исходной установки рабочего органа и начальной привязки к системе координат станка.
Опорная точка – узловые точки на эквидистанте (траектории движения центра инструмента), меняющие геометрическое или технологическое состояние траектории.
Контрольные вопросы
1. Определите, когда выгодно применять:
а) многооперационные станки;
б) станки с ЧПУ.
2. В каком направлении будут развиваться СЧПУ?
3. Поясните термины:
а) «разрешающая способность станка»;
б) «опорная точка».
4. В каких случаях рационально применять роботы?
3. Информация в системах автоматизации
Информация – сведения о явлениях природы, событиях в общественной жизни, процессах в технических устройствах.
Код – система знаков, однозначно определяющая информацию.
Сообщение – зафиксированная информация в материальной форме.
Непрерывное сообщение – физическая форма информации.
Дискретное сообщение – набор элементов (букв, символов), из которых в дискретные моменты времени формируются некоторые последовательности.
Набор отличающихся элементов – алфавит.
Последовательность числовых символов – цифровая информация.
С любой необходимой точностью любое непрерывное сообщение можно заменить цифровым сообщением путем квантования непрерывного сообщения по уровню и по времени.
Преобразование и передача дискретной информации любой формы (например, текста) могут быть сведены к эквивалентным преобразованиям и передаче цифровой информации.
3.1. Точность информации
Точность информации в системах автоматизации в перую очередь зависит от погрешности первичных датчиков, преобразующих физические, химические и другие технологические величины в электрические сигналы: напряжение, ток, частота, фаза, цифровая информация.
Информация с первичных датчиков передается, преобразуется, обрабатывается, запоминается, индицируется. Наибольшая погрешность возникает при передаче информации. На рис. 3.1, а показано увеличение точности при передаче информации в различных ее формах.
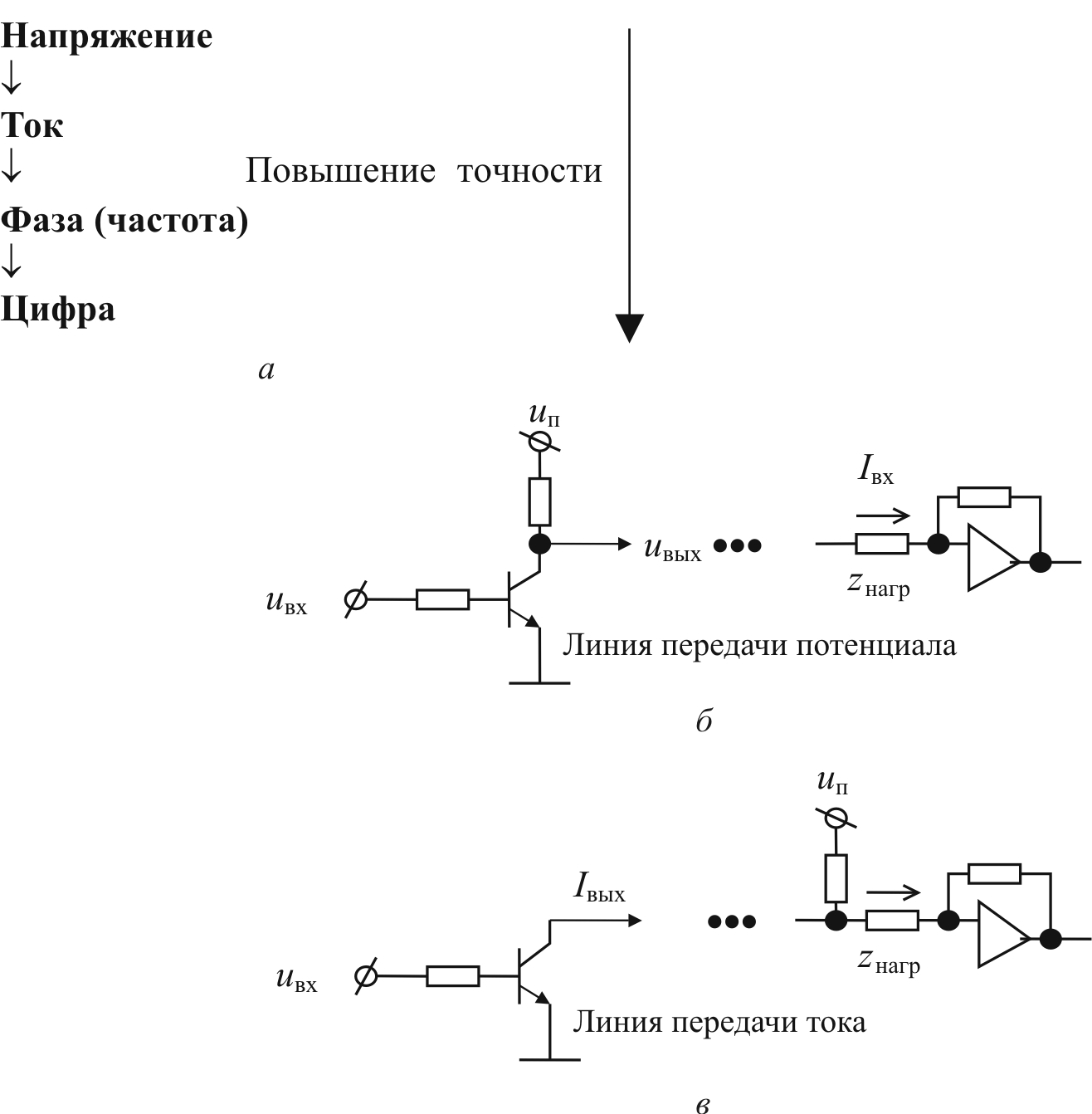
Рис. 3.1. Точность при передаче информации: а) увеличение точности передачи информации с изменением ее формы; б) линия передачи потенциала; в) линия передачи токового сигнала
Напряжение, ток, частота – непрерывные формы информации. Фаза может быть в непрерывной форме (гармонический сигнал) и в дискретной (частотный импульсный сигнал). Цифровой сигнал – дискретный.
Выходной элемент линии по напряжению или току один – транзистор (рис. 3.1, б и рис. 3.1, в). Сигналы по току передаются без потерь информации в линии в зависимости от ее длины. Но линия может быть только двухточечная или цепочечная с транслятором.
На линию передачи потенциала помехи влияют сильнее. Здесь и zнагр значительно больше.
В цифре достигается любая требуемая по техническим условиям точность – все зависит от количества разрядов.