

15.5. Расчет экономической эффективности применения частотно-регулируемого электропривода
1. Регистрируем потребляемую двигателем привода мощность Р0, кВт, при полностью закрытой задвижке на линии нагнетания, его cosφ, давление на линии нагнетания Н0, мм. в. ст.
2. Регистрируем потребляемую двигателем привода мощность Рм, кВт, при полностью открытой задвижке на линии нагнетания, его cos, давление на линии нагнетания Нм, мм. в. ст., максимальную производительность насоса Qм, м3/час, при средней величине противодавления.
3. По полученным данным строим зависимости P = P0 + (Pм - P0) Q/Qм – расход электроэнергии в зависимости от производительности в существующей системе (кривая 1 на рис. 15.10);
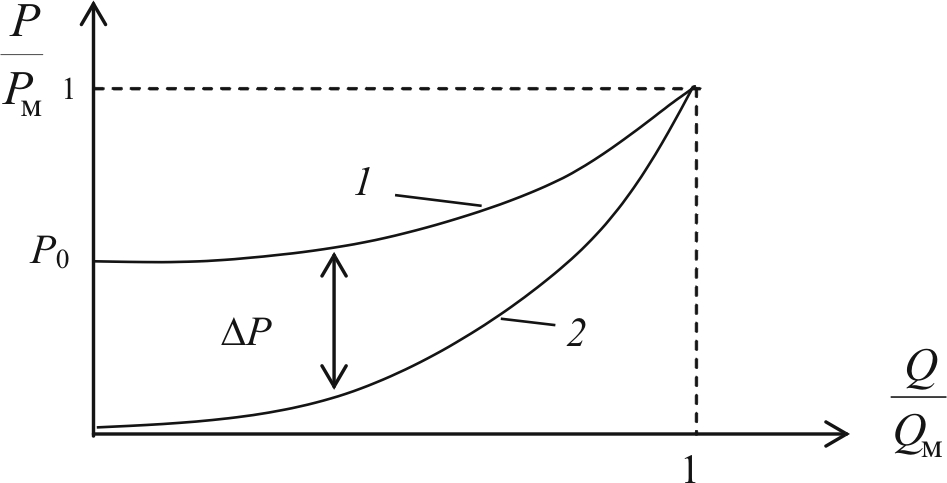
Рис. 15.10. Потребляемая турбомеханизмом мощность: 1 – регулирование задвижкой; 2 – регулирование скоростью
Р = Рм × (Q / Qм)3 – расход электроэнергии в зависимости от производительности при применении ЧРЭП (кривая 2 на рис. 15.10). Разница между кривыми 1 и 2 равна экономии мощности Р при частотном регулировании скорости.
4. Определяются суточные графики нагрузки электродвигателя рассматриваемого турбомеханизма по суткам, неделям, месяцам, периодам года.
5. В каждом рассматриваемом периоде определяется продолжительность работы с загрузкой Рi, для которой исходя из графиков на рис. 15.6 определяется экономия мощности DРi.
6. Определяется суммарная экономия электроэнергии за годовой цикл работы оборудования по формуле
![]()
где DРi – экономия мощности за i-й период, кВт; ti – время, в течение которого привод работает с нагрузкой Рi.
7. С учетом фактора экономии воды (воздуха) при снижении напоров магистрали (K = 1,15…1,2) стоимость сэкономленной энергии Стэл = (1,15…1,2)ТэЭ, где Тэ – тариф на электроэнергию в энергосистеме, руб/кВтч.
8. Мощность ЧРЭП с учетом запаса 10 % равна РЧРЭП = 1,1Рм кВт. Удельная стоимость ЧРЭП в настоящий момент колеблется от 100 до 400 долл. США (у отечественных производителей ниже).
9. Окупаемость ЧРЭП: Ток = (dу Kd РЧРЭП) / Стэл, где dу – удельная стоимость 1 кВт ЧРЭП, долл./кВт; Kd – курс доллара, руб.
Отечественные товаропроизводители выпускают ряд ЧРЭП, по своим характеристикам практически не отличающихся от зарубежных, но по стоимости более дешевых.
Компания «Триол» (Санкт-Петерберг), используя комплектующие ряда фирм, выпускает ЧРЭП серии АТ01–АТ05 от 5 до 315 кВт на 0,4 кв и от 160 до 1600 кВт на 6 (10) кв.
ОАО «Электровыпрямитель» (Саранск) на отечественных IQBT-транзисторах выпускает преобразователи частоты 16–63 А, 0,4 кВ; 400 А, 0,4 кВ.
«Allen Bradley», дочерняя компания корпорации «Rockwell Automatik», основана в 1903 году, действует в 57 странах, выпускает продукцию 350 000 наименований, в том числе:
частотно-регулируемые ЭП на диапазон мощностей до 14 тыс. кВт и напряжение до 7200 В при наработке на отказ до 16 лет;
программируемые контроллеры серии SLC (Small Logic Controllers) – 24 наименования, в т.ч. модули дискретного и аналогового ввода/вывода, модули быстрого счета и позиционирования и др.;
программируемые контроллеры серии PLC-5 (более развитая, но дороже), в которую входят только 14 моделей процессоров и огромное количество различных модулей;
программируемые контроллеры серии CL (Control Logix), как многопроцессорная многозадачная система при SLC/PLC комплекте конструкций, позволяющая строить многоуровневые сетевые АСУ ТП с «прозрачностью» для системного и прикладного программного обеспечения. Последнее позволяет в процессе работы с управляющего компьютера не только менять уставки и параметры процессов, но и изменять алгоритмы управления практически в любом контроллере сети;
набор датчиков: температуры, давления положения, фотоэлектрические сенсоры, устройства считывания штрихового кода, машинное зрение, датчики приближения, граничные переключатели и т.д.;
набор панелей отображения, рабочих мест операторов.
Среди сдерживающих факторов внедрения регулируемых электроприводов:
отсутствие экономической и моральной заинтересованности ИТР в энергоресурсосбережении;
деление на технологов, электриков и киповцев не способствует эффективной поддержке частотно-регулируемых электроприводов (эффект на стыке этих служб);
отсутствуют целевые программы и группы для ее реализации из представителей ряда групп.