

15.4. Особенности регулирования скорости турбомеханизмов
Среди центробежных насосов выделяют:
– коммунального и промышленного водоснабжения,
– погружные для подачи воды и нефти из скважин,
– циркуляционные (практически не имеют статического напора),
– питательные, водоотлива,
– транспортирующие нефть, порошковые материалы и т.д.
Для регулирования производительности насосов с учетом статического напора не менее 20 % от полного напора обычно требуется регулировать скорость 30–35 %.
Пуск насосов обычно производится на закрытую задвижку (статический момент чисто вентиляторный с максимальным моментом 40–80 % от номинального).
Вентиляторы, воздуходувки, эксгаустеры потребляют существенное количество электроэнергии (4–7 % общей электроэнергии по разным оценкам). Основное их количество – сантехнического назначения (кондиционирование воздуха). Обследования показывают, что только 10–20 % работают в оптимальных условиях (только 40 % вентиляторов на шахтах Донбасса работали с > 60 %). Необходимый диапазон регулирования скорости не превышает 50 %, пуск, как правило, облегченный, при закрытом направляющем аппарате (Мmax 0,4 Мн).
Турбокомпрессоры используются для сжатия воздуха, газов, транспортировки газа. По характеристикам они близки к насосным установкам, но при регулировании скорости изменяется наклон напорных характеристик (при более высоких скоростях повышается степень сжатия газа и их плотность). Различают: воздухогазодувки (Р2/Р1 1,15), нагнетатели (Р2/Р11,15), компрессоры (Р2/Р1 4). Особенность работы турбокомпрессоров в том, что каждой скорости вращения соответствует определенная критическая производительность машины, ниже которой работа становится неустойчивой. Причиной возникновения неустойчивой работы турбокомпрессора является повторяющийся срыв потока с рабочих и направляющих лопаток, что приводит к сильным пульсациям давления, открыванию и закрыванию обратного клапана и возникновению аварийных колебаний в системе. Такой режим называется помпажным и недопустим.
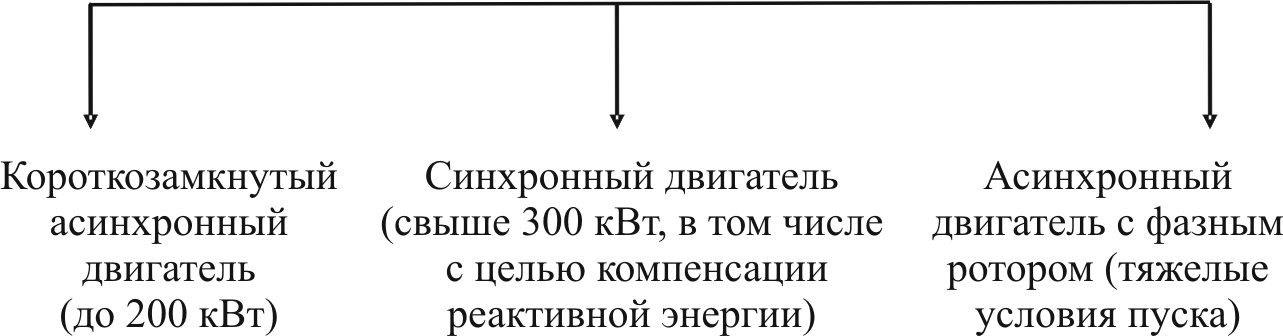
Регулирование производительности турбокомпрессоров на газовых магистралях производится ступенчато (изменением числа работающих машин) и плавно (регулированием скорости одной установки). В последнем случае достигается 25 % увеличения КПД данной установки по сравнению с дросселированием. Таким образом, требуется регулировать скорость турбомеханизмов не более чем на 50 %. На рис. 15.9 приведена классификация систем электропривода турбомеханизмов.
Нерегулируемый ЭП
Регулируемые ЭП (рекомендуемые)
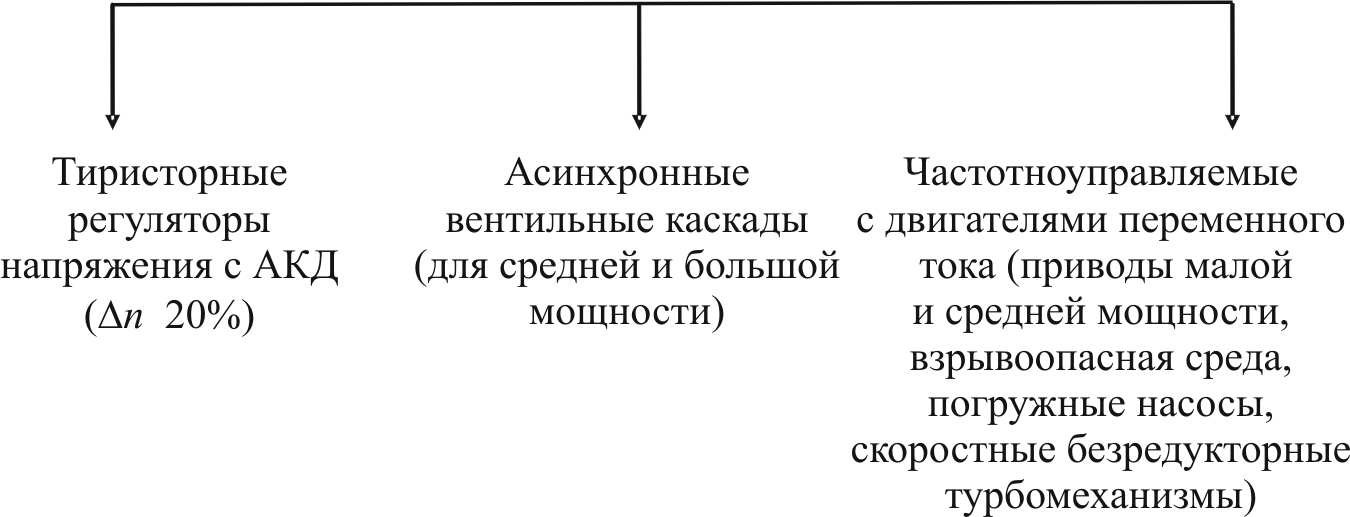
Рис. 15.9. Классификация систем электропривода турбомеханизмов
В настоящее время доминирующими регулируемыми электроприводами турбомеханизмов становятся частотно-регулируемые электроприводы с асинхронными и синхронными двигателями по следующим причинам:
энергосбережение в последнее время стало одной из наиболее актуальных общемировых проблем. Уменьшение запасов природных энергоносителей, ухудшающаяся экологическая обстановка поставили перед потребителями энергоресурсов задачу использования самых экономичных электроприводов;
наличие качественных и надежных, простых в настройке, с широким диапазоном применения преобразователей частоты;
широкий диапазон регулирования частоты, большой спектр напряжений и мощностей преобразователей частоты, возможность контроля параметров двигателя (I, U, f, P и т.д.), защита двигателя (по току, к.з. на землю и между фазами, от импульсных помех, провалов напряжения и т.д.), развитая система диагностики неисправностей (50–100 видов), встроенные ПИД-регуляторы для технологических параметров, программируемые параметры разгона и останова двигателя;
использование уже имеющихся асинхронных короткозамкнутых и синхронных двигателей без снижения их мощности;
возможность максимально эффективно адаптировать работу электродвигателей и нагрузки к требованиям технологического процесса;
частотно-регулируемые электроприводы не требуют текущего обслуживания со стороны персонала цехов, а установка и внедрение возможны по частным техническим решениям без выполнения проекта (в течение одного рабочего дня выполняется монтаж, наладка, прокладка интерфейсного кабеля в помещение управления с монтажом пульта дистанционного управления).
Например, в АСУ насосными агрегатами центрального теплового пункта (ЦТП), предлагаемой ЗАО «Sterling Group» (Москва), российского партнера корпорации «Rocknell Automation», для электроприводов сетевых циркуляционных насосов и насосов горячего водоснабжения используются устройства плавного пуска, преобразователи частоты и программируемые контроллеры фирмы «Allen Bradley» (США). В результате автоматизации были сделаны следующие достижения:
уменьшается износ подшипников электродвигателей и насосов (большую часть времени агрегат работает при пониженном напоре);
уменьшаются протечки теплоносителя, в том числе через сальник насосов (большую часть времени работы насоса задвижки полностью открыты, поскольку регулирование расхода теплоносителя осуществляется изменением частоты вращения электродвигателя);
уменьшается износ коммутационной аппаратуры;
снижаются величины токов, протекающих в силовых цепях в переходных и установившихся режимах (пусковые токи электродвигателей при частотном управлении и плавном пуске не превышают рабочих, а токи установившихся режимов уменьшаются вследствие снижения напора насоса);
уменьшается опасность аварий на трубопроводах вследствие гидроударов, поскольку при частотном управлении и плавном пуске давление в переходных режимах изменяется плавно и с заданной интенсивностью (по имеющемуся опыту в коммунальной сфере количество мелких ремонтов основного оборудования снижается в 2 раза);
эффективность защиты технологического оборудования повышается, так как с помощью электронных узлов преобразователей частоты и плавных пускателей реализуются независимые каналы защиты: от перегрузки асинхронного двигателя, от работы асинхронного двигателя на двух фазах или при пониженном напряжении, от работы при неисправности насоса или запорной арматуры;
контроль состояния ЦТП упрощается, поскольку обеспечивается измерение и обработка текущих значений параметров функционирования оборудования и автоматизированный расчет основных энергетических показателей технологического процесса;
внедрение частотно-регулируемых электроприводов с локальными системами автоматического управления на ЦТП позволяет уменьшить годовое потребление электроэнергии (в зависимости от полноты применяемых энергосберегающих мероприятий и графиков нагрузки) для сетевых насосов – до 30…60 %, для насосов ГВС – до 40…70 %;
комплексная автоматизация технологического процесса на ЦТП и определенные изменения тепловой схемы дают возможность экономить тепловую энергию в объеме 30–40 % в год.
По данным фирмы, регулируемый электропривод, используемый для насосов городских систем горячего и холодного водоснабжения, позволяет на 40–50 % сократить расход электроэнергии, на 20 % – воды и тепла. Срок окупаемости частотно-регулируемого электропривода, в зависимости от мощности двигателя, при мировом уровне цен на оборудование (в среднем 150–250 долл. за кВт) составляет 0,3–1,5 года (отметим, что частотно-регулируемые электроприводы фирмы, как высоконадежные, на конкурсной основе выбраны для лифтового хозяйства Храма Христа Спасителя).
В инструкции по расчету экономической эффективности применения частотно-регулируемого электропривода, утвержденной в Минтопэнерго в 1999 году, подтверждается, что интегральное потребление электроэнергии на насосах и вентиляторах ТЭС при применении ЧРЭП может быть снижено на 25–40 %, на насосах и вентиляторах систем водо-воздухо-снабжения городских РТС, котельных и ЦТП экономия электроэнергии составляет до 60 %, а в системах водоснабжения экономия потребления холодной воды – до 25 %, горячей воды – до 15 %. Примеры расчета экономической эффективности, приведенные в данной инструкции, показывают, что внедрение ЧРЭП окупается за 1,6–3,5 года только за счет сэкономленной электроэнергии.