

15.3. Регулирование производительности турбомеханизмов
На рис. 15.1–15.5 приведены примерные характеристики турбомеханизмов, работающие на трубопроводную вентиляционную сеть различными способами регулирования производительности. Характеристика сети обычно имеет вид
H = Hст + RQ2,
где Hст – предварительный напор (высота, на которую приходится поднимать жидкость или преодолевать противодавление); Hдин характеризует гидравлическое сопротивление магистрали.
Из этих характеристик следует, что можно регулировать производительность турбомеханизмов четырьмя основными способами.
1. Изменить скорость (см. рис. 15.1).
2. Изменить сопротивление трубопровода с помощью заслонок (дросселирование) (см. рис. 15.2).
3. Изменить угол наклона лопаток направляющего аппарата (см. рис. 15.3).
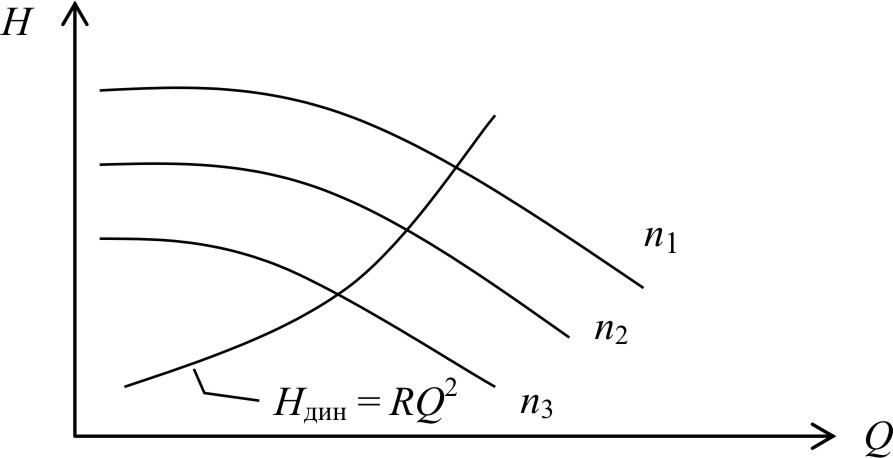
Рис. 15.1. Q–H-характеристики турбомеханизма при регулировании скорости
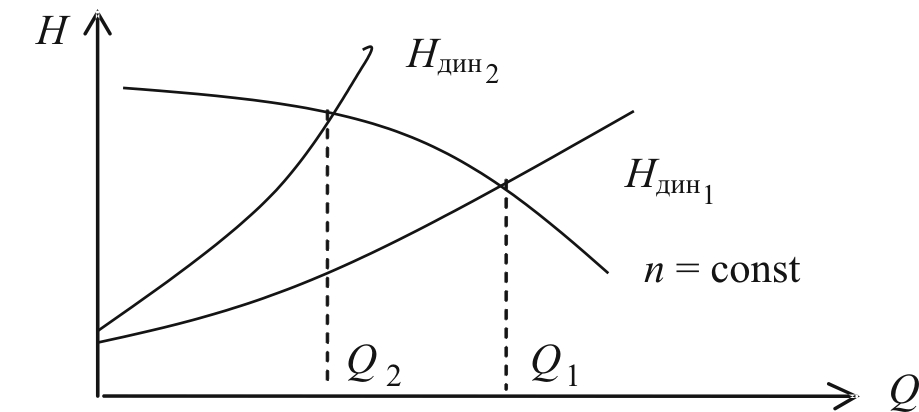
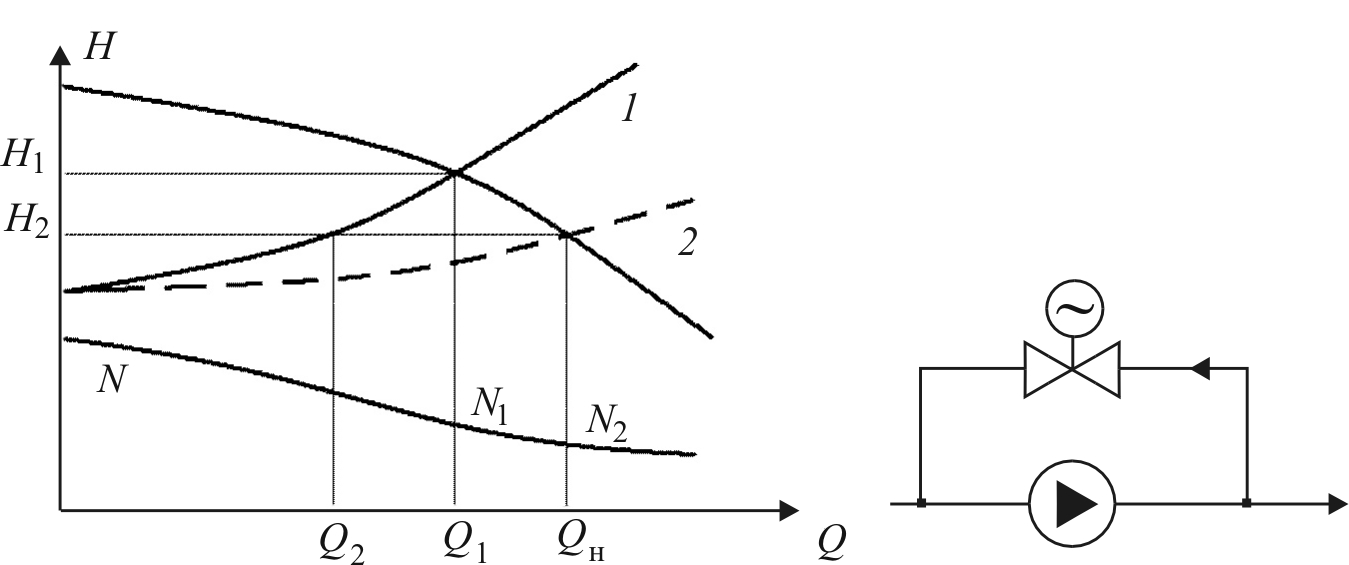
Рис. 15.2. Q–H-характеристики турбомеханизма при дросселировании
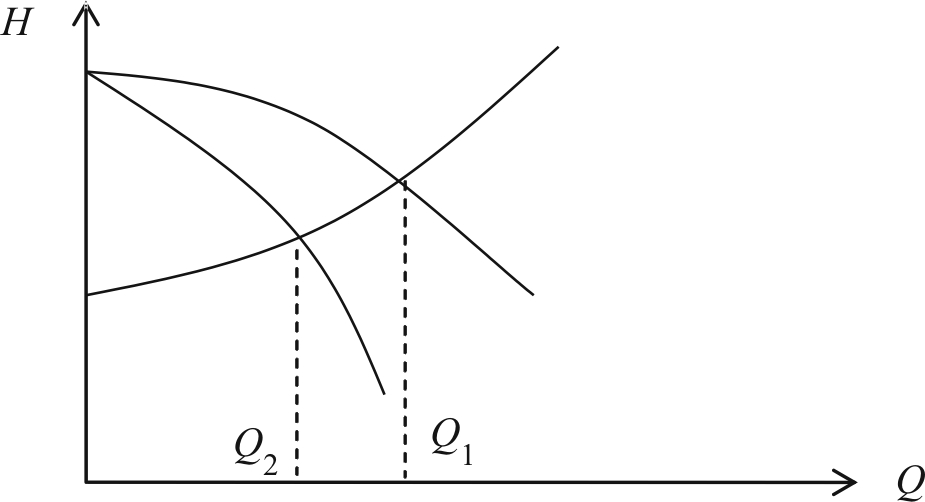
Рис. 15.3. Q–H-характеристики турбомеханизма при применении направляющего аппарата
4. Изменить число параллельно или последовательно работающих на одну сеть турбомеханизмов (см. рис. 15.4, 15.5).
Регулировка производительности параллельным соединением насосов выгодна при пологой характеристике сети (см. рис. 15.4), последовательное соединение – при крутой характеристике сети (см. рис. 15.5).
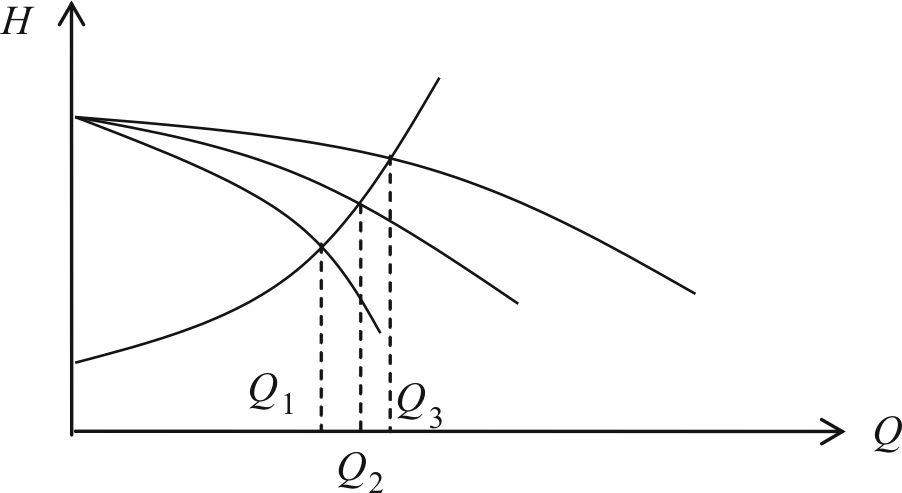
Рис. 15.4. Q–H-характеристики при параллельном соединении турбомеханизмов
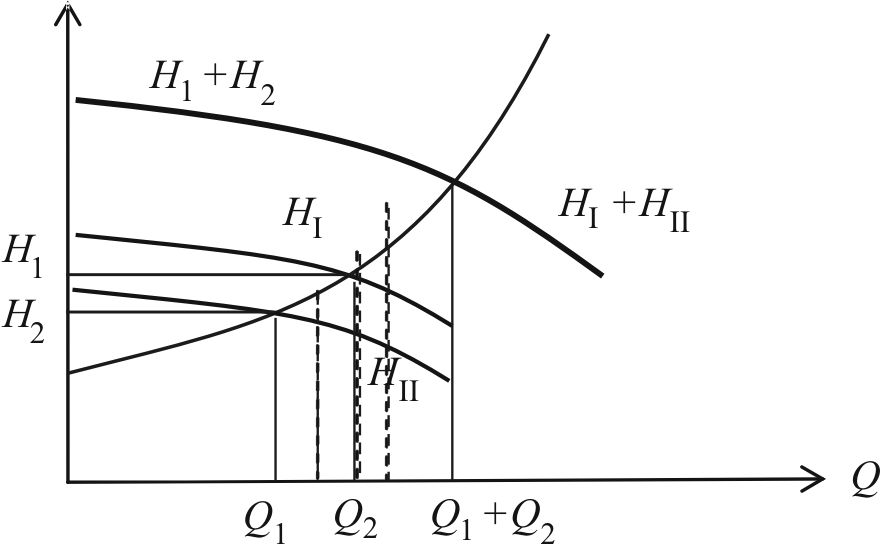
Рис. 15.5. Q–H-характеристики при последовательном соединении турбомеханизмов
Сравним первые основные четыре способа регулирования производительности. 1-й, 3-й, 4-й способы экономичны, так как одновременно со снижением расхода снижается и напор. 2-й способ – изменением сопротивления – пока наиболее широко применяемый, но самый затратный.
В последнем случае полезная мощность при снижении производительности (см. рис. 15.2) P2 = CQ2 H2; расходуемая мощность P2 = CQ2H2.
Таким образом, мощность потерь на задвижке
DPпот
= CQ2(H2 –![]() )
= CQ2DH.
)
= CQ2DH.
КПД понижается на
величину hрег
=
![]() .
.
Кроме того, снижается КПД самого насоса. По оценке специалистов, потери из-за неэкономичного регулирования составляют для городских водопроводных станций 10–15 % суммарного потребления электроэнергии.
Практика показывает, что в проекте закладываются завышенные расход и напор. При этом турбомеханизмы работают не на максимальных КПД (0,35–0,4 вместо 0,6–0,7). Учитывая, кроме того, что обычно еще на стадии проектирования мощность двигателя закладывается с запасом до 20 %, еще более понижается общий КПД.
Другие недостатки данного способа:
износ задвижек, необходимость их ремонта и замены (особенно в агрессивных средах);
износ электродвигателя и турбомеханизма из-за работы на преодоление дополнительного сопротивления регулирующей задвижки.
Следует отметить, что при необходимости поддерживать в магистрали постоянный напор при изменении гидродинамического сопротивления, что весьма желательно для долговременной работы трубопроводов и предотвращение разрывов в ночное время, регулирование скорости – единственный способ регулирования производительности (рис. 15.6).
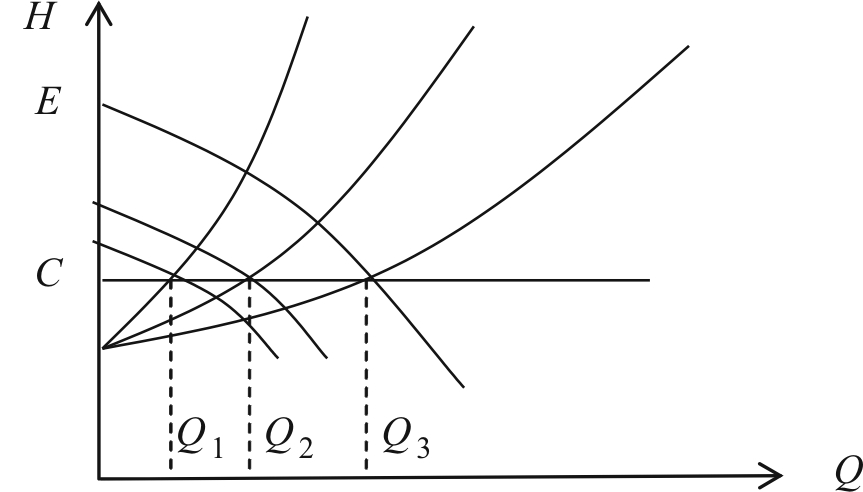
Рис. 15.6. Регулирование производительности турбомеханизма скоростью при постоянстве напора
Необходимая степень снижения скорости может быть найдена, учитывая, что при Q = 0 напор прямо пропорционален квадрату скорости, т.е. для точек Е, С Hmax = HE = Anном2, Hпред = HС = Anmin2, откуда
![]() .
.
Для турбомеханизмов при отсутствии противодавления (Нст = 0; Ндин = RQ2) при регулировании скорости
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
,
тм = const и не зависит от скорости.
Если Q1, H1, n1 соответствуют оптимальной работе турбомеханизма (тм = max), то при регулировании скорости будет обеспечен тм.max и для других характеристик.
Данные зависимости широко используются для расчета характеристик турбомеханизмов при регулировании скорости и при Нст ¹ 07.
Рассмотрим пример. На рис. 15.7 даны характеристики турбомеханизма при работе с номинальной скоростью Н = f (Q), = f (Q), P = f (Q). Определить мощность на валу турбомеханизма в точке В при работе на пониженной скорости.
Через
начало координат проводится кривая Н
= СQ2
до пересечения с кривой Q –
H
(точка С).
Учитывая, что
![]() ,
Q1
= QB
,
Q1
= QB
![]() .
Для Q1
находим Рмех1,
1.
Учитывая, что при вентиляционном моменте
сопротивления В
= С
= 1,
.
Для Q1
находим Рмех1,
1.
Учитывая, что при вентиляционном моменте
сопротивления В
= С
= 1,
Рмех. В
=
![]() ,
,
или
Рмех. В
= Рмех.1
 .
.
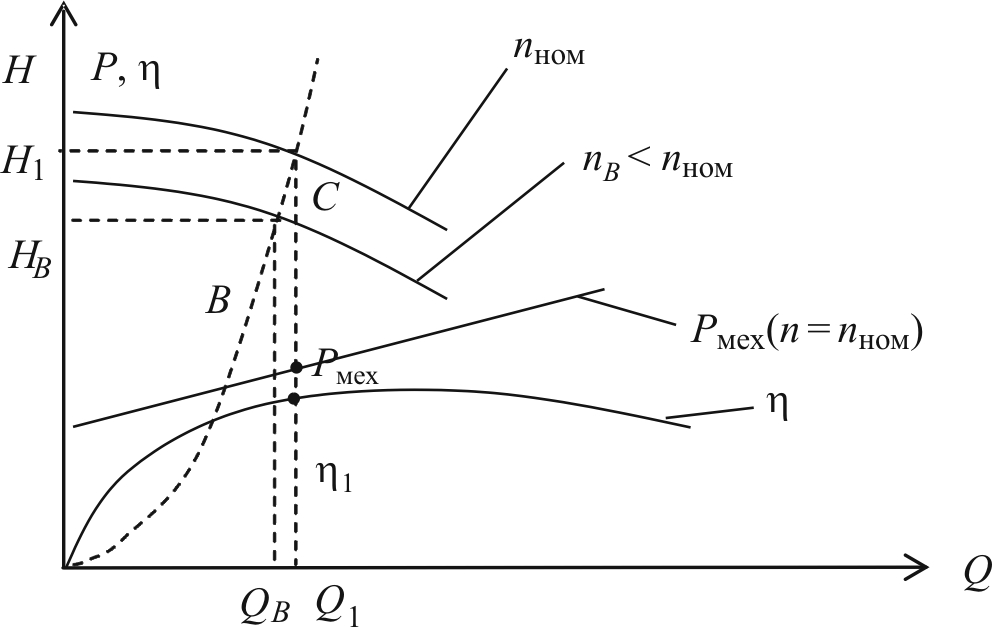
Рис. 15.7. Характеристики турбомеханизма при регулировании производительности скоростью вращения
На практике реализуют совместно два способа регулирования производительности: скоростью и числом параллельно работающих агрегатов. Этим достигается несколько целей:
высокая степень резервирования;
возможность регулирования скорости только у одного турбомеханизма;
значительное снижение мощности силового преобразователя регулируемого электропривода, т.е. капитальных затрат.
Кроме четырех основных способов, имеются и другие способы регулирования производительности турбомеханизмов:
обрезка рабочих колес;
перепуск части подаваемой жидкости или газа через байпас на вход;
впуска воздуха во всасывающий патрубок.
В практике эксплуатации для расширения области применения центробежных насосов применяют обрезку рабочих колес, уменьшая наружный диаметр D2 рабочего колеса. Опыт показывает, что при этом параметры изменяются:
![]() ,
,
![]() ,
η = const .
,
η = const .
Используют также регулирование подачи насосов и компрессоров перепуском части подаваемой жидкости или газа через байпас на вход насоса (рис. 15.8). При этом общая подача насоса Qн увеличивается, но подача в сеть Q2 уменьшается. Применение байпаса снижает общее сопротивление сетевой магистрали, может привести к перегрузке насоса и электродвигателя. Указанный способ экономичен для вихревых насосов, у которых при увеличении подачи мощность уменьшается.
Иногда на канализационных насосных станциях применяют способ регулирования путем впуска воздуха во всасывающий патрубок насоса. Характеристика насоса становится более пологой аналогично регулированию направляющих аппаратом. Этот способ
а б
Рис. 15.8. Регулирование производительности насоса байпасированием
экономичнее регулирования задвижкой. Его достоинство – насыщение кислородом стоков для развития биологических очищающих процессов, недостаток – снижение срока службы рабочих колес под воздействием кавитационного износа.