

Регуляторы с им постоянной скорости
В системах регулирования давления, расхода и других величин управление регулируемыми клапанами, вентилями, задвижками, шиберами до настоящего времени осуществляется через исполнительные механизмы.
Исполнительные механизмы бывают с электрическим (преимущественно), гидравлическим или пневматическим приводом. В качестве электрического привода используются асинхронные двигатели, которые, как правило, получают питание от сети 380/220 В и могут быть в трех состояниях: перемещение рабочего органа с постоянной скоростью S, неподвижность, перемещение в обратную сторону с постоянной скоростью.
Без учета времени разгона и торможения статическая характеристика такого ИМ представлена на рис. 14.28 и может быть записана в виде
где – перемещение рабочего органа;
Z – выходной сигнал пускового релейного устройства;
![]() –
скорость рабочего
органа;
–
скорость рабочего
органа;
![]() –
зона нечувствительности
релейного элемента, управляющего
пусковым оператором (магнитный пускатель,
электромагнитное реле и т.п.).
–
зона нечувствительности
релейного элемента, управляющего
пусковым оператором (магнитный пускатель,
электромагнитное реле и т.п.).
Такая статическая характеристика называется трехпозиционной.
Чаще всего для снижения частоты включения релейного элемента в характеристику включают «люфт» (зону неоднозначности) ^, как показано на рис. 14.29, где в – зона включения.
Это соответствует реальности, если электромагнитные аппараты срабатывают при большом, а отпускают при меньшем значении выходного сигнала. Такая характеристика формируется также непосредственно промышленным регулятором.
Статическая
характеристика ИМ существенно нелинейна.
Однако такой ИМ может иметь выходной
сигнал, достаточно близкий к линейной
характеристике при релейно-импульсном
изменении входного сигнала. Пусть на
вход ИМ поступают импульсы Z
с периодом следования Тпер и
скважностью
![]() .
Тогда характер перемещения будет иметь
вид, представленный на рис. 14.30.
.
Тогда характер перемещения будет иметь
вид, представленный на рис. 14.30.
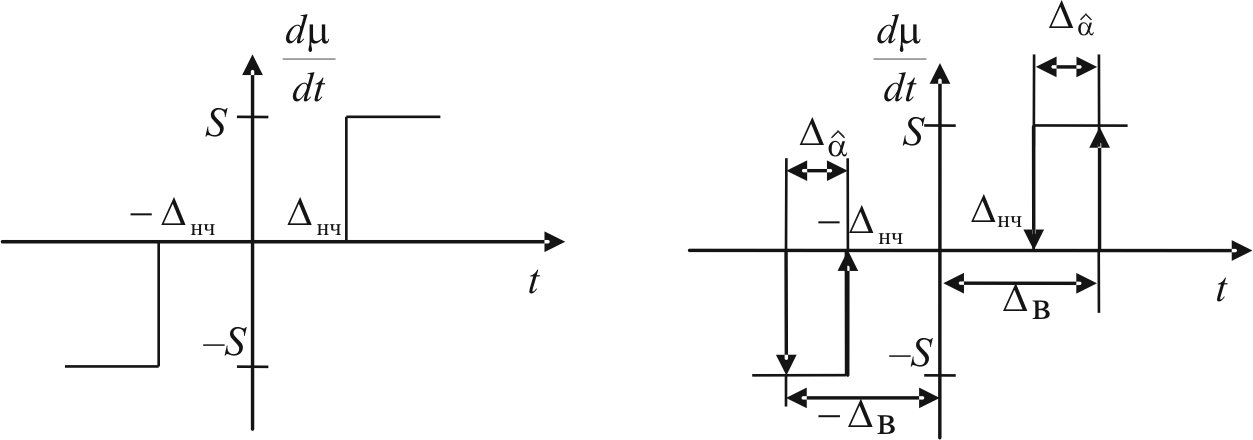
Рис. 14.28. Релейный элемент с зоной нечувствительности |
Рис. 14.29. Релейный элемент с зоной нечувствительности и люфтом |
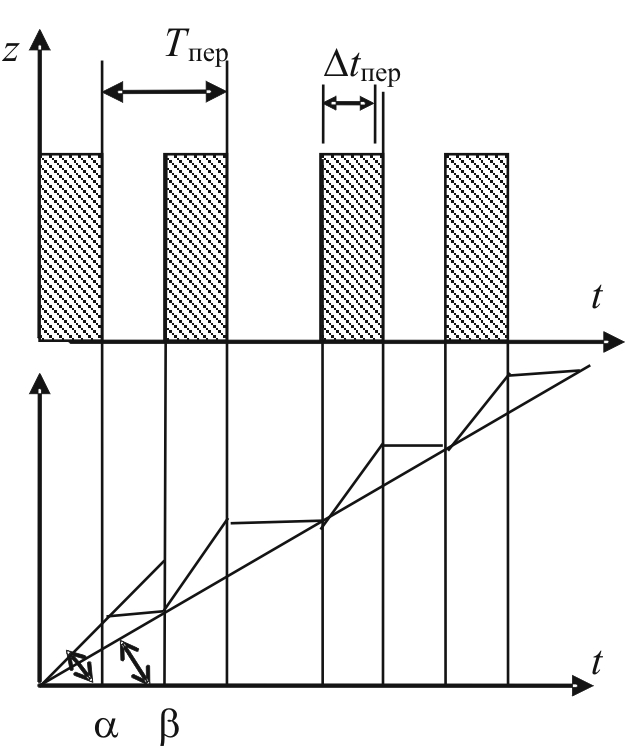
Рис. 14.30. Характер перемещения ИМ при релейно-импульсном изменении входного сигнала
Скорость перемещения
во время импульса равна:
![]() .
.
Средняя
скорость перемещения будет равна:
![]()
![]()
Таким образом, ИМ
постоянной скорости по каналу «скважности
импульсов – усредненное перемещение»
можно представить интегрирующим звеном
![]() .
.
Реализация И-регулирования будет тем точнее, чем меньше Тпер. Однако или этом повышается частота включения ИМ, следовательно, и его износ. Величина Тпер, как будет показано ниже, будет зависеть от величины в, нч, частоты среза разомкнутой САР объекта управления.
Передаточная
функция ПИ-регулятора
![]() ,
его реализация приведена на
рис. 14.31, переходная характеристика
при рассогласовании
,
его реализация приведена на
рис. 14.31, переходная характеристика
при рассогласовании
![]() (постоянный сигнал) – на рис. 14.32.
(постоянный сигнал) – на рис. 14.32.
По схеме, приведенной на рис. 14.31, можно независимо настраивать коэффициент усиления и постоянную изодрома.
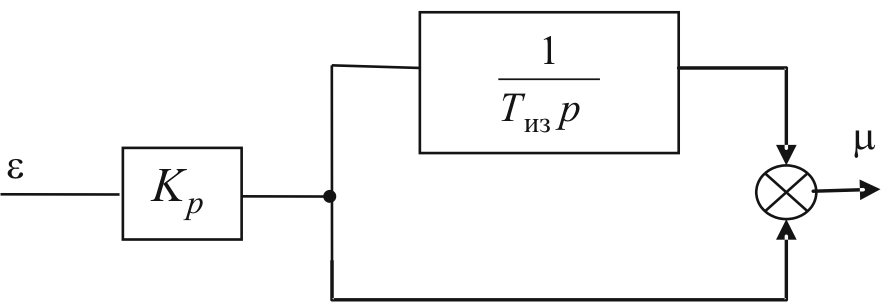
Рис. 14.31. Схема ПИ-регулятора
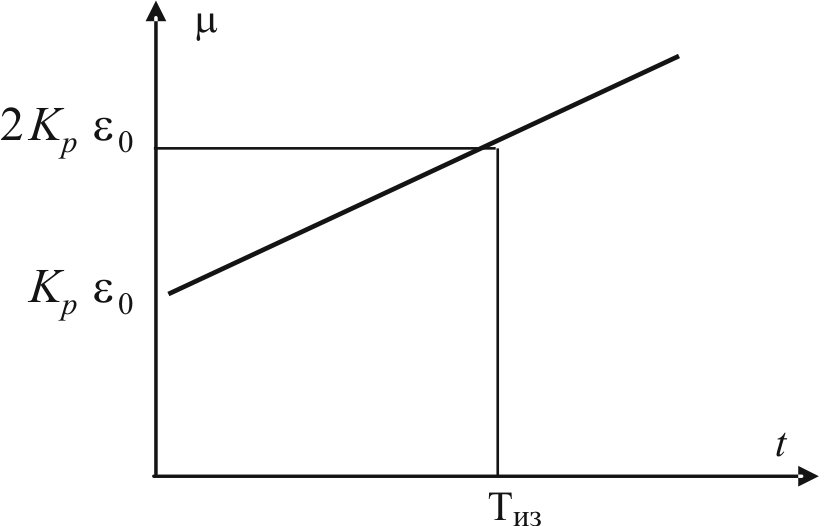
Рис. 14.32. Переходная характеристика ПИ-регулятора
В промышленных системах регулирующее звено и исполнительный механизм чаще всего объединяют в единое целое – промышленный регулятор со структурной схемой, представленной на рис. 14.33,

Рис. 14.33. ПИ-регулятор с ИМ постоянной скорости
с передаточной
функцией
![]() ,
,
где
![]() .
.
![]()
Реализация форсирующего звена – сложная практическая задача, которую решают по схеме, представленной на рис. 14.34.
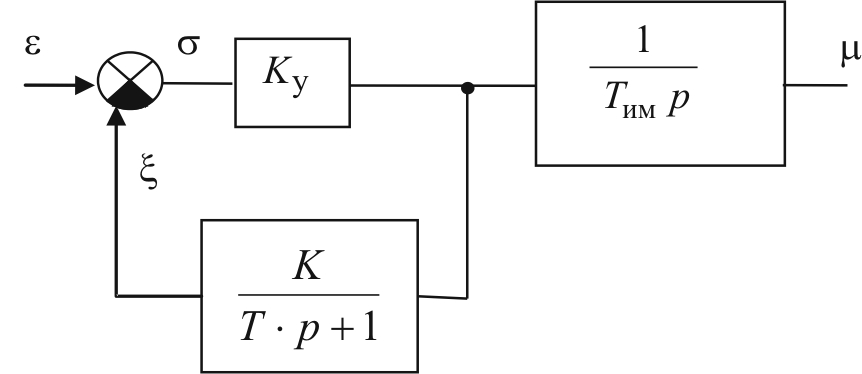
Рис. 14.34. ПИД-регулятор с ИМ постоянной скорости
Передаточная функция усилительного звена:
 .
.
Для получения промышленного ПИ-регулятора с передаточной функцией необходимо равенство

Отсюда
![]()
![]() .
.
Если выбрать
![]() ,
то
,
то
![]() .
.
Получаем реальный
ПИ-регулятор с фильтрующей апериодической
постоянной
![]()
Подобным же образом реализуется промышленный регулятор при импульсном ПИ-регуляторе с ИМ постоянной скорости (рис. 14.35).
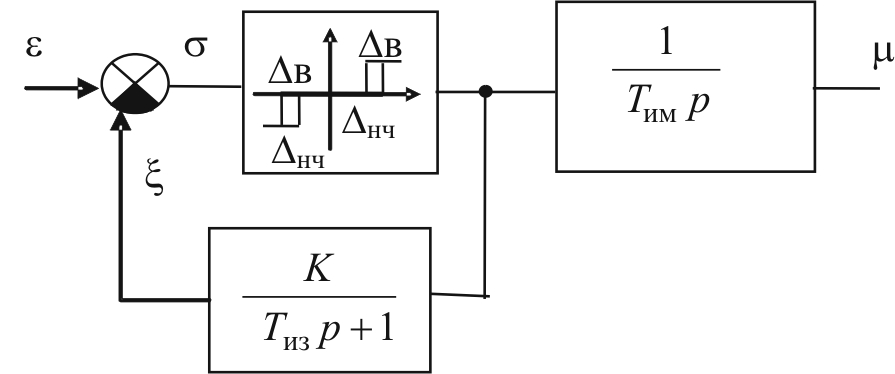
Рис. 14.35. Реализация ПИ-регулятора с ИМ постоянной скорости
Переходные процессы в такой структуре представлены на рис. 14.36.
В начале переходного процесса = 0 – > нч – реле включается, увеличивается по экспоненте к величине kz. В момент равенства 0 – = нч – в – реле отключается, уменьшается по такой же экспоненте к нулю. При 0 – = нч реле снова включается.
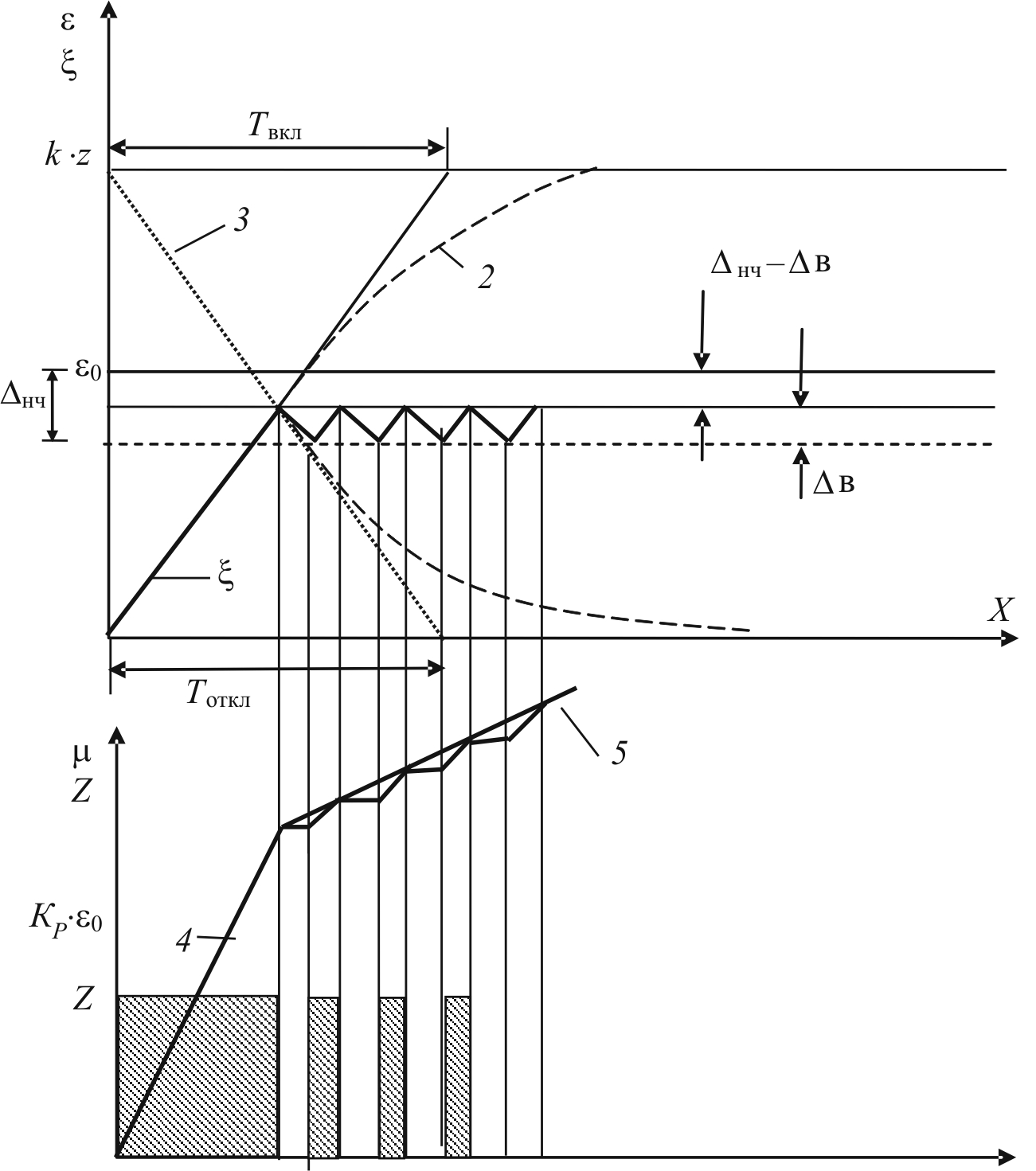
Рис. 14.36. Переходные процессы выходного сигнала ПИ-регулятора с ИМ постоянной скорости: 1 – рассогласование (t); 2 – = f(t) при нарастании (реле включено); 3 – = f(t) при снижении (реле отключено); 4 – реальное изменение = f(t); 5 – линеаризованное изменение = f(t)
Автоколебательный процесс релейного усилителя будет продолжаться до момента, когда рассогласование 0 будет стремиться к нулю. Сигнал на выходе ИМ (перемещение) с достаточной степенью точности соответствует выходному напряжению линейного ПИ-регулятора.
В промышленных регуляторах нередко настраивают различные постоянные времени Твкл и Тоткл апериодического звена (см. рис. 14.36).
При первом отключении
![]() –
параметр настройки регулятора,
называемый скоростью связи. Приближенно
время первого включения
–
параметр настройки регулятора,
называемый скоростью связи. Приближенно
время первого включения
![]() .
.
Переходные процессы по при первом включении ((0) = 0) описываются формулами
![]()
![]() .
.
В автоколебательном режиме время импульса

Переходные процессы по при первом включении ((0) = 0) описываются формулами
![]()
В автоколебательном режиме время импульса
Учитывая, что в автоколебательном режиме при пульсациях на малую величину в можно принять вкл отк,
 .
.
Переходные процессы
по при отключении
((0) = k ·![]() )
описываются формулами
)
описываются формулами
![]() ,
,
![]()
 ,
,
Скважность импульсов
 ,
,
где
![]() .
.
Учитывая, что для
ИМ
![]() ,
имеем
,
имеем
![]()
или
![]()
Твкл Тоткл, В 0, таким образом, имеем ПИ-регулятор.
![]()
где
![]() ,
Тиз = Тоткл.
,
Тиз = Тоткл.
Линеаризированная кривая 5 выхода ПИ-регулятора при = 0 описывается уравнением
![]()
При расчете ПИ-регулятора:
1) известно Тим, Z, S, Kp, Тиз;
2) определено Тоткл = Тиз;
3) рассчитывается
![]() ;
;
4) рассчитывается
![]() .
.
Практическая реализация ПИД-регулятора выполняется по схеме, приведенной на рис. 14.37.
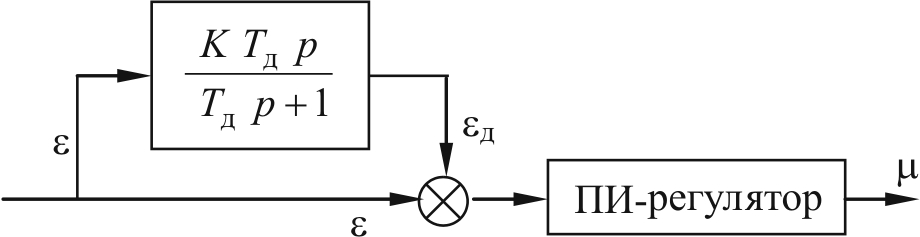
Рис. 14.37. Реализация ПИД-регулятора
Передаточная функция регулятора в этом случае
![]() .
.
Если Тд Т1, Kд > 1, имеем реальный ПИД-регулятор.
 .
.
ЛАЧХ ПИД-регулятора представлена на рис. 14.38.
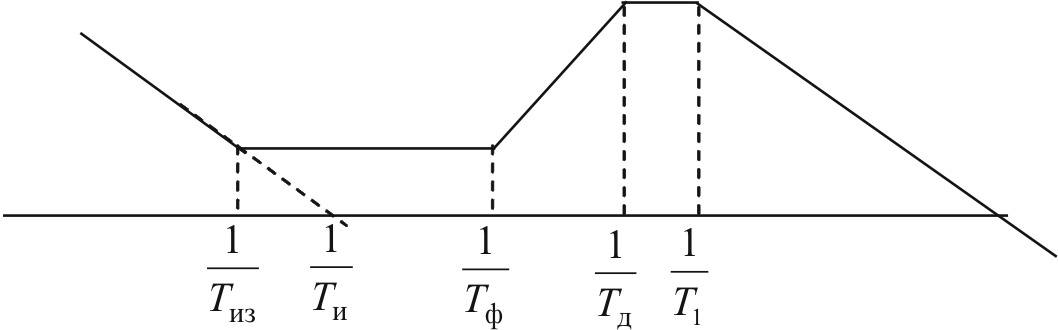
Рис. 14.38. ЛАЧХ ПИД-регулятора
Реализация ПИ- и ПИД-регуляторов многообразна и приводится в технических описаниях промышленных регуляторов4.