

14.3. Регулирование нагрузки котла
Показателем качества функционирования этой системы является удельный расход топлива, который должен быть минимальным. Однако непосредственное оперативное управление этим показателем не представляется возможным, так как его вычисление связано с достаточно длительным интегрированием расхода топлива и нагрузки энергоблока. Поэтому предпринимались многочисленные поиски косвенной регулируемой величины, поддержание которой на том или ином уровне гарантировало бы достаточно приемлемую близость удельного расхода к минимуму.
Известно, что высокое качество сгорания топлива возможно только при вполне определенном подводе воздуха в топку. На рис. 14.4 представлена схема САУ, получившая название «топливо – воздух», которая решает задачу. Регулятор подачи воздуха в топку Рв воздействует на регулирующий орган подачи воздуха. На его вход подается разность между действительным расходом воздуха Gв и его заданным значением G3в, которое вырабатывается в командном блоке (КБ) в зависимости от изменения расхода топлива Gт по заранее составленной режимной карте. Режимная карта может быть скорректирована подачей воздействия .
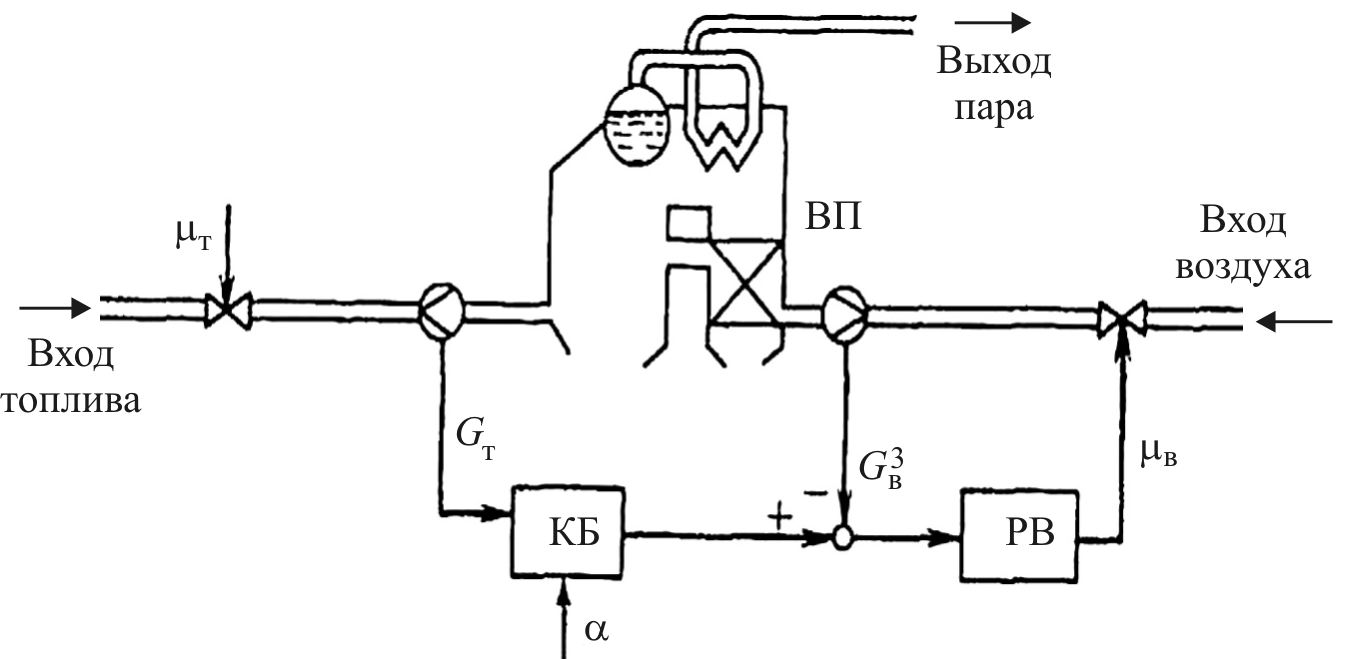
Рис. 14.4. Регулирование соотношения «топливо – воздух»
Заметим, что, поскольку расход топлива меняется регулятором давления пара, приведенную схему следует рассматривать как часть автономной двумерной системы, управляющей одновременно давлением пара и качеством сгорания топлива.
Другой вариант схемы регулирования качества горения топлива использует существующую закономерность между качеством горения топлива и содержанием кислорода в уходящих газах. Схема такой системы представлена на рис. 14.5. Это каскадная схема, главным регулятором в которой является регулятор содержания кислорода РО2, воздействующий на вспомогательный регулятор расхода воздуха РВ в составе системы «топливо – воздух». Заданный расход воздуха зависит от расхода топлива. Сигнал от расхода топлива подается на вход регулятора воздуха РВ через командный блок КБ. Необходимость использования каскадной схемы обусловлена относительно большим запаздыванием, которым обладают существующие приборы-анализаторы содержания кислорода в уходящих газах.
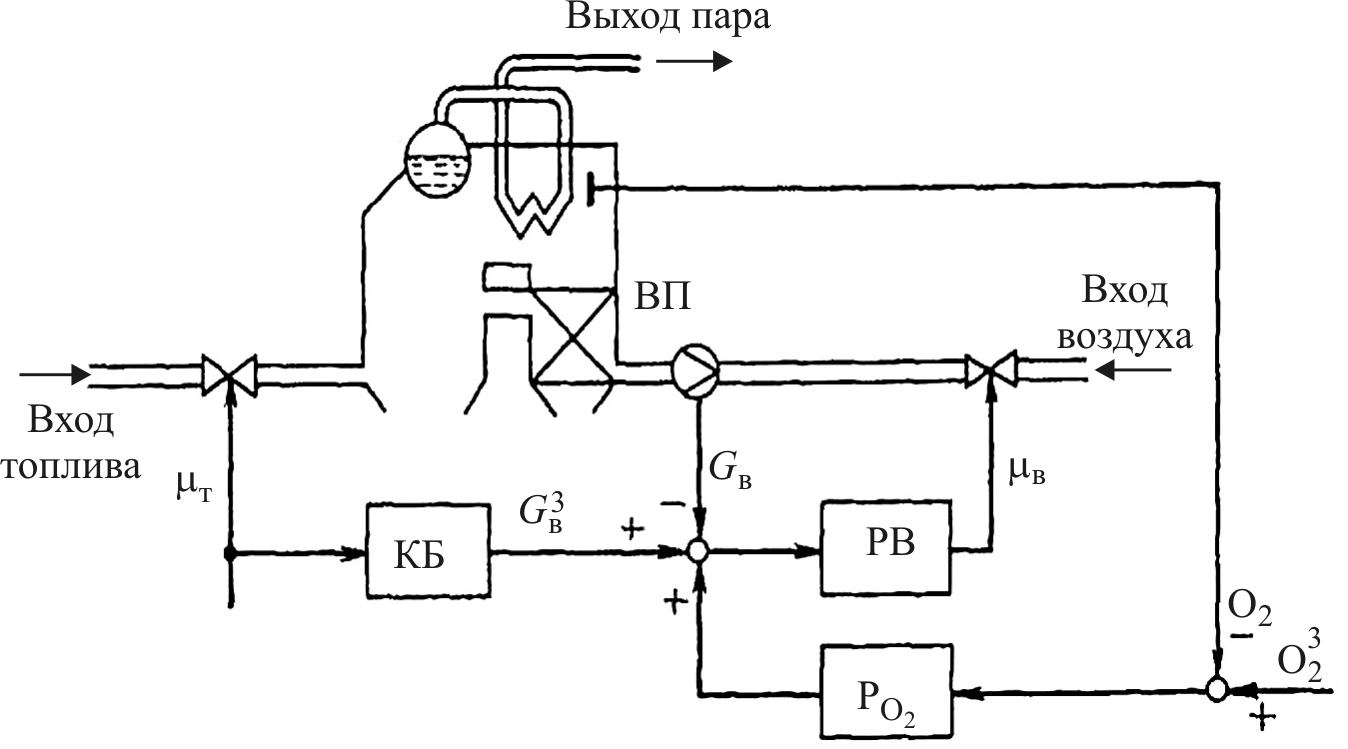
Рис. 14.5. Каскадное регулирование соотношения «топливо – воздух» с главным регулятором по содержанию кислорода
Регулятор давления пара в главном паропроводе
Главный регулятор ГР является заданием для регуляторов тепловой нагрузки-газ (РТН-газ) отдельных котлов, которые изменяют подачу топлива на котел, тем самым поддерживают заданное давление пара в общей магистрали.
Структурная схема регулирования приведена на рис. 14.6. Главный регулятор получает два сигнала: давление в общей магистрали; задание.
Управление регулятором предусматривается физическое (с пульта управления или дистанционно). В состав главного регулятора должны входить:
– блок процессора;
– задатчик давления в главном паропроводе;
– датчик избыточного давления в главном паропроводе (типа Метран-100 или других);
– переключатель.
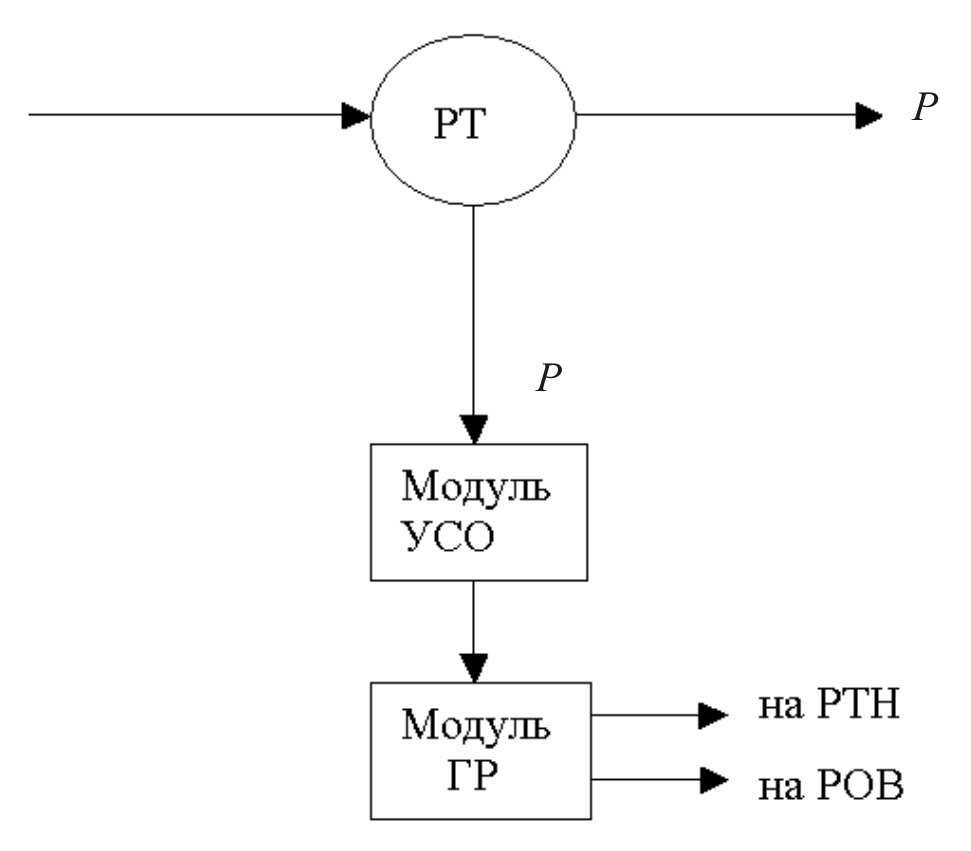
Рис. 14.6. Структурная схема регулирования главного регулятора: РТН – регулятор тепловой нагрузки; РОВ – регулятор общего воздуха; УСО – устройство связи с объектом; ГР – главный регулятор; РТ – регулятор подачи топлива
Переключатель служит для перевода регуляторов тепловой нагрузки отдельных котлов в базовый или регулируемый режимы с местным или дистанционным управлением.
Регуляторы тепловой нагрузки установлены на каждом из котлов, работающих на главный паропровод. Структурная схема регулирования тепловой нагрузки приведена на рис. 14.7.
Регулятор получает два сигнала: от главного регулятора; от датчика расхода пара.
В комплект регулятора тепловой нагрузки входят следующие элементы:
– блок процессора;
– датчик расхода пара;
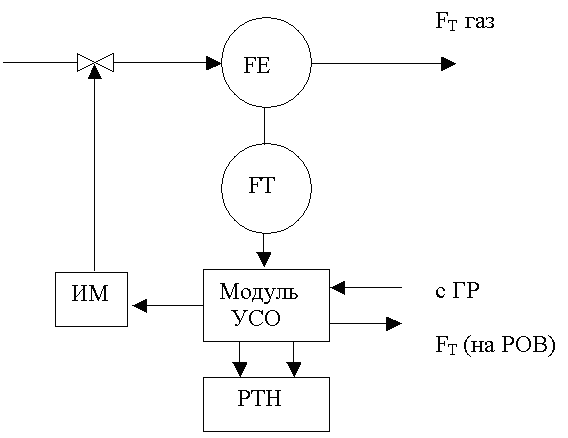
Рис. 14.7. Структурная схема регулирования тепловой нагрузки: FE – первичный измерительный преобразователь для измерения расхода; FT – прибор для измерения расхода; ИМ – исполнительный механизм; ГР – главный регулятор
– исполнительный механизм МЭО;
– указатель положения МЭО;
– регулирующий орган (шарообразная заслонка или поворотный клапан).