

12.2. Лвс: доступ к каналу, способы кодирования, типы сообщений, сетевые системы
Остановимся на локальных сетях, большое значение которых для АСУ ТП после знакомства со структурой АСУ ТП становится ясным.
Канал связи магистрального типа (общая шина или кольцо) получает преимущественное распространение в настоящее время (в локальных сетях), поскольку позволяет предоставлять всем абонентам сети равноправные возможности для установления связи, потенциально обладает более высоким быстродействием. Такой канал связи называют также разделяемым моноканалом (в отличие от выделяемых «точка – точка»), поскольку он обеспечивает одновременную передачу информации от одной станции сразу ко всем станциям. Однотипное подключение абонентов через блок доступа (адаптер) к моноканалу создает свободно связанную и свободно наращиваемую систему с чрезвычайно гибкими возможностями. Именно такая система наиболее перспективна для целей управления ГПС. Моноканал не накладывает принципиальных ограничений на свойства подключаемых к нему машин и систем управления. Сеть может быть гетерогенной (т.е. состоящей из разнородных, не совместимых по системе команд ЭВМ) или гомогенной (ЭВМ одной ветви вычислительной техники). Сеть может быть одноранговая (наличие централизации – серверы, хостмашины) и многоранговая (с невыделенным сервером).
Задача управления в ГПС состоит, скорее, в кооперации равноправных систем, чем в их соподчинении. Указанная кооперация содействует достижению некоторой общей цели: максимальная производительность, наиболее полное использование оборудования, в итоге – наилучший социально-экономический эффект.
При построении сети на основе моноканала нужно обеспечить равную степень доступности канала для всех абонентов. Хотя бы два из них могут одновременно требовать доступа на передачу.
Случайный доступ – все абоненты равны и могут выходить на передачу в любое время. Преодоление конфликтов (разрешение коллизий) возможно с помощью следующих стратегий:
тактирование моментов допустимых передач;
«Слушай, прежде чем говорить» – прослушивание несущей частоты канала, начало передачи лишь тогда, когда канал свободен;
«Слушай, пока говоришь» – если во время начала передачи одного сообщения делается попытка передать другое, то передача всех абонентов прекращается с задержкой, определенной для каждого абонента (приоритет все же есть).
Детерминированный доступ – метод последовательных передач, метод временного разделения моноканала, метод централизованного управления каналом.
Метод последовательных передач – доступ предоставляется лишь тому абоненту, у которого в данный момент находится жезл (эстафета, маркер). После того как держатель жезла посылает сообщение, жезл передается другому абоненту (удобно при топологии «кольцо»).
Метод временного синхронного разделения канала – каждому абоненту свой интервал передачи.
Метод временного асинхронного разделения канала – если для интервала по предыдущему способу соответствующий абонент сообщения не подготовил, то длина интервала сокращается, чтобы увеличить пропускную способность канала.
Метод централизованного управления – моноканал предоставляется абоненту арбитром сети.
В настоящее время наибольшее распространение нашли два метода доступа:
прослушивание несущей с разрешением коллизий задержкой передачи на интервал, определенный для каждого абонента;
жезловый (маркерный) доступ.
Для кольцевых структур существует проблема удаления сообщения из сети с тем, чтобы оно не оставалось там и не циркулировало больше одного круга. Промежуточные узлы пропускают и одновременно копируют все проходящие сообщения. Как только установлено, что промежуточный узел не нуждается в проходящем сообщении, копия удаляется. После возвращения сообщения к узлу-источнику предпринимается процедура очистки сети от этого сообщения.
В качестве физической среды для передачи сигналов используют многожильный электрический кабель (плоский или 16-проводный кабель-жгут), одножильный кабель (витая пара), коаксиальный кабель, оптоволоконный кабель. Для резервирования и живучести ГПС прокладывают двойной комплект физических линий связи.
Последовательный код сообщения может быть представлен при передаче по-разному. Обычно способ представления «1» и «0» уровнем напряжения или тока не может быть использован ввиду малой скорости передачи.
Требования к коду:
минимум постоянной составляющей, чтобы из-за заряда емкостных цепей приемника не проходило смещение сигнала относительно начального уровня сравнения, причем такое смещение будет зависеть от передаваемой информации;
за один синхроимпульс передачи одного бита нужен хотя бы один переход 10 или 01, иначе трудно выделить синхроимпульсы при приеме.
Из различных правил кодирования в настоящее время получил наибольшее распространение код «Манчестер» (типа BIF-L), по которому при «1» осуществляется переход 10 в середине синхроимпульса (передатчика), при «0» – переход 01. Ниже на примере показан принцип кодирования:
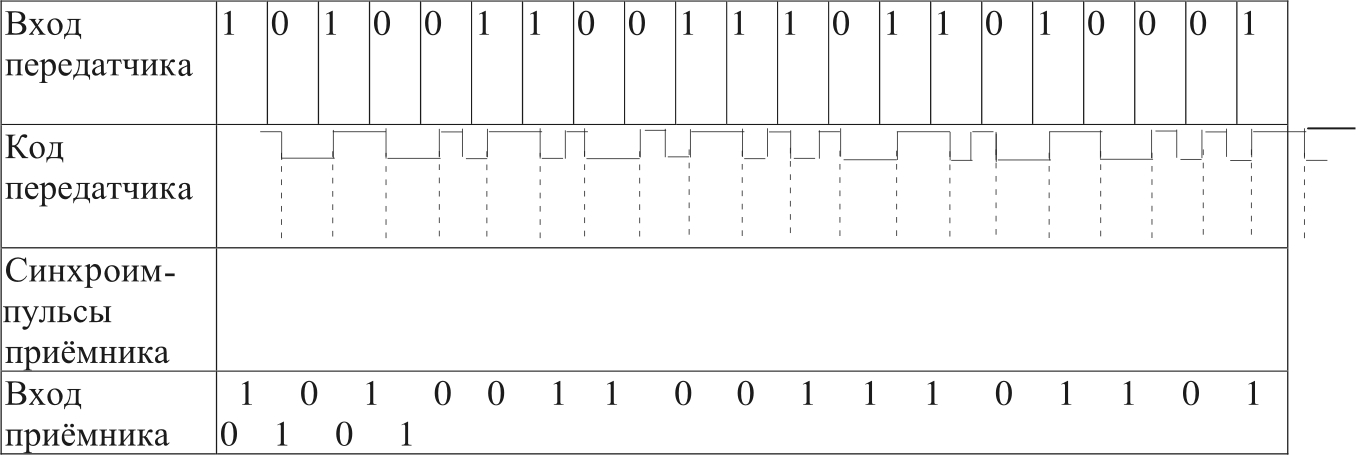
Из кода на приемном устройстве легко выделить синхроимпульсы. По фронту синхроимпульса 10 выделяем «1», по фронту 01 выделяем «0».
Из временной диаграммы следует, что постоянная составляющая манчестерского кода равна нулю.
Принимающая сторона должна дешифрировать еще 4 символа, дополнительно включенных в манчестерский код:
N (non – data) – не данные;
P (pad – idle) – холостой наполнитель;
B (bad signal) – искаженный сигнал;
S (silence) – молчание.
Назначение этих символов:
N – начальный и конечный флажок сообщения, имеет формат:
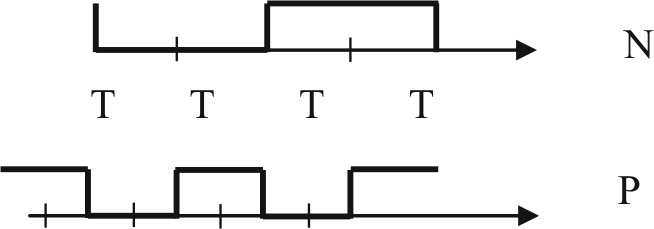
Р – преамбула сообщения (период синхроимпульса);
В – искажаемый сигнал, принимаемый код не соответствует манчестерскому коду;
S – молчание (канал свободен), по каналу следует только несущая (модулирующая) частота.
Сетевой контроллер (адаптер) реализует следующие функции:
приемопередающее устройство, которое как минимум, организует обмен сигналами данных с каналом, обеспечивает гальваническую развязку и усиление сигналов;
поддерживает дисциплину доступа к каналу, поддержку протоколов сети;
контроль корректности принимаемых из сети сообщений;
выполняет диагностические функции;
строит передаваемые в сеть кадры сообщений;
осуществляет буферизацию информации, связь с МП и памятью абонента и другие функции.
Производственная информация в современном понимании – это не просто единое управление станками и технологическими системами участка или цеха. Предполагается, что такая интеграция охватывает системы управления технологическим оборудованием, АСУ завода, инженерные графические и инструментальные средства, системы теледоступа к удаленным службам и т.д. Каждое из подобных подразделений организовано по типу автономной ЛВС, и каждая такая сеть построена на базе собственных принципов организации (топология, методы доступа, кодирования, протоколы).
Тем не менее у всех сетей должна быть некоторая единая информационная основа, которая и является необходимым условием их совместимости.
Таким образом, главный принцип построения большой интегрированной системы – декомпозиция на подсистемы при сохранении информационной совместимости подсистем.
Выделим в составе интегрированной системы 4 группы локальных сетей: административные сети, сети инженерных служб, сети управления производством, сети реального времени.
Административные сети обеспечивают коллективное использование вычислительных средств и периферийного оборудования. Объем сообщений, циркулирующих в сети, колеблется от малого до среднего: приказы, письма, доклады, оповещения, служебные записки, электронная почта. Из-за большого количества абонентов загрузка сети носит случайный характер. Поэтому принимают случайный метод доступа, обеспечивая быструю реакцию для простых коротких заданий и замедление реакции для сложных емких заданий. Обычное время доступа 2–5 с. Административные сети не предъявляют высоких требований к надежности сетевого оборудования, поэтому стоимость такого оборудования сравнительно невелика.
Сети инженерных служб напоминают административные, но должны быть приспособлены к передаче очень больших файлов данных между графическими станциями и вычислителями. Основной характеристикой сети инженерной службы является не реактивность (время доступа 2–5 с), а производительность. И в этом случае применяются сети со случайным доступом, но требования к надежности выше, т.к. эксплуатируется дорогое оборудование.
Сети управления производством характеризуются небольшим объемом административной и организационной информации, но объемной информацией проблемно-ориентированного управляющего характера. По сети передаются большие файлы управляющих программ и технологических заданий, меньшие по объему файлы статусов и конкретные команды управления. Пользователями сети являются и люди, и автоматические устройства. Реактивность сети должна соответствовать потребностям автоматических устройств, а не людей (время доступа 0,5–2 с). В таких сетях считается более целесообразным маркерный метод доступа. Стоимость сетей управления в силу требований высокой надежности в несколько раз выше, чем стоимость административных сетей и сетей инженерных служб.
Сети реального времени передают файлы и сообщения типа статуса, основную загрузку создают короткие повторяющиеся сообщения, осуществляющие синхронизацию и управление (табл. 12.3).
Таблица 12.3
Вид сообщения |
Размер сообщения |
Средняя периодичность передачи, мин |
Допустимая задержка, с |
Требуемая скорость передачи, кбод |
Удаленная загрузка операционной системы Удаленная загрузка программ ЧПУ, данные отчетности (массивы) Инструкции оператору Цеховой диалог
Запросы от одной системы управления к другой на обслуживание Отчеты, статусы, сообщения регистрации Аварийные сигналы (наивысший приоритет) Команды прямого управления – ответы (наибольшее число сообщений) |
500 кбайт
1–5 кбайт
1,5 кбайт 1,5 кбайт
64 байта
0,5–3 кбайта
32 байта
50 байт |
300
120
0,5 интерактивный режим 0,5
60
нерегулярная
15
|
60
10
5 2
0,1
1
0,01
0,1
|
50–100
4,8
4,8 9,6
9,6
38
38
9,6 |
Потоки сообщений достаточно упорядочены. Время реакции и загрузка сети вполне поддается оценкам (время доступа 0,01–5 с). Сетевая электроника работает непосредственно в тяжелой производственной среде, но требования к надежности здесь наиболее высоки.
Специфика системы управления гибким производством в том, что она объединяет ряд характеристик, присущих сетям различных групп. Здесь имеется СУБД, производится удаленная загрузка операционных систем, решаются задачи оперативного управления и прямого управления оборудованием в реальном времени и т.д. Характер информационных сообщений в сетях ГПС приведен в табл. 12.3.
Типы сообщений конкретизируют в рамках языка информационных сообщений. Язык регламентирует синтаксис и семантику сообщений.

Рис. 12.17. Структура полей информационного сообщения в ГПС
Представим один из популярных вариантов такого языка для ГПС. Единица сообщения – кадр, длина которого не превышает 512 байт. Структура полей информационного сообщения представлена на рис. 12.17.
Х – тип передачи, в числе которых A, C, D, E, N, U:
A – уведомление об отказе передатчика от передачи;
C – передача команды запроса;
D – передача данных, причем не последнего блока передаваемого по частям файла;
E – передача данных, причем последнего или единственного блока;
N – отказ от передачи по инициативе приемника по причине невозможности выполнить какую-то команду или неверно принятой информации;
U – запрос на незапланированную передачу по инициативе передатчика (запланированная передача – по инициативе приемника, нуждающегося в передаче).
Дальнейшая детализация содержания сообщения осуществляется введением подтипов передачи:
NAM (name) – имя файла или программы;
STA (status) – статус, т.е. описание состояния объекта;
MSG (message) – электронная почта (экранное сообщение);
EXE (execution) – инициация выполнения;
FIL (file) – признак файла.
Очередной шаг уточнения содержательной части сообщения состоит в указании форматов данных или в использовании расширений команды. Установлены следующие форматы данных:
BCL (binary cutter location data) – информация об инструменте;
BIN (binary data) – информация в двоичном коде;
ISO – управляющая программа в коде ISO;
INS (inspection data) – результаты измерения;
TST (test data) – тесты.
Расширения команды привязаны к подтипам передачи.
Так, подтип STA имеет расширения: ALL (передается полный набор данных); CYC (состояние автоматического цикла); INH (состояние блокировки); PRG (состояние отработки программы); ALM (признак аварийного останова) и др.
Подтип EXE имеет расширения: ARP (обращение к локальной системе ГПМ); CCP (задание коррекций на инструмент); CRT (обращение к устройству управления транспортным робокаром); AUT (обращение к режиму «автомат»); CYC (обращение к автоматическому циклу); LDR (задание роботу на загрузку заготовки); PLT (задание на идентификацию определенной палеты); PRT (задание на идентификацию определенной детали); UGP (разжим); ULP (разгрузка) и т.д.
Подтип FIL имеет расширения: CLO (закрыть файл); DEL (стереть файл); DIR (обращение к справочнику); RED (считать файл); REN (переименовать файл); WRT (записать файл).
Расширения имеет и тип N (подтипы в этом случае не используются): CNE (команда не выполнена); DNA (данные недоступны); DNR (данные не готовы); FLU (файл в работе); FNA (файл недоступен); FNF (файл не найден); FNI (функция не реализована); FNO (файл не открыт); MNQ (сообщение отсутствует); PNF (пакет, т.е. блок сообщений, не найден); SMF (запоминающее устройство заполнено); SNQ (данные о состоянии неизвестны); SNR (система не готова).
Синтаксические диаграммы передач и сессий см. в [12].
Более подробно о ЛВС и промышленных шинах можно узнать из пособия [10].