

10.5. Первые поколения контурных счпу
В первоначальных системах ЧПУ широко использовались шаговые двигатели, на систему управления которых поступает сразу унитарный код с интерполятора.* Данные разомкнутые системы в настоящее время вытесняются следящими электроприводами, рассмотренными ниже.
10.6. Фазовый индикаторный и разностный режимы работы устройства связи с электроприводом
В СЧПУ типа CNC индикаторный режим реализуется по структуре, показанной на рис. 10.7, где ПКФ, ЦАП, ФД (ПФН) – преобразователи информации, принципы работы которых описаны в предыдущих главах. В этом случае *, ω* – двоичный код, поступающий с интерполятора и блока задания скорости.
Делители частоты ДЧ имеют коэффициент деления N.
Режим работы датчика положения в фазовом индикаторном режиме называют режимом фазовращателя. Это основной режим работы в большинстве аппаратных стоек ЧПУ.
Данная же структура используется и при унитарном коде (перемещение – количество импульсов и задание скорости – частота по данной координате), но вместо ПКФ и ЦАП используются ПЧФ и ПЧН.
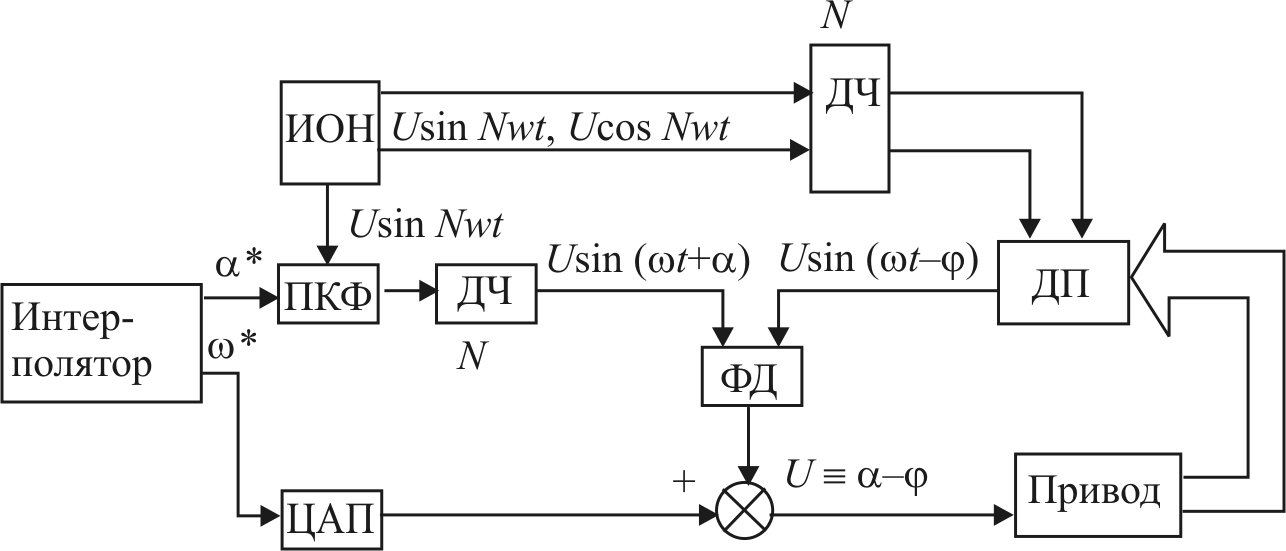
Рис. 10.7. Структура следящего электропривода с фазовым индикаторным регулятором положения
Фазовый разностный режим работы устройства связи с электроприводом представлен на рис. 10.8. В данной структуре за счет уменьшения зоны работы ФД и того, что ФД работает на постоянной частоте , итоговая точность СЧПУ возрастает.
Недостаток данной структуры – датчик положения не дает информации об истинном положении привода (для индикации, например), а сразу рассогласование по положению.
Есть системы связи, работающие при амплитудно-индикаторном или амплитудно-разностном режиме работы измерителей рассогласования и датчиков положения*. Такие СЧПУ не нашли распространения, хотя обеспечивают повышенную точность в фазоимпульсных СЧПУ.
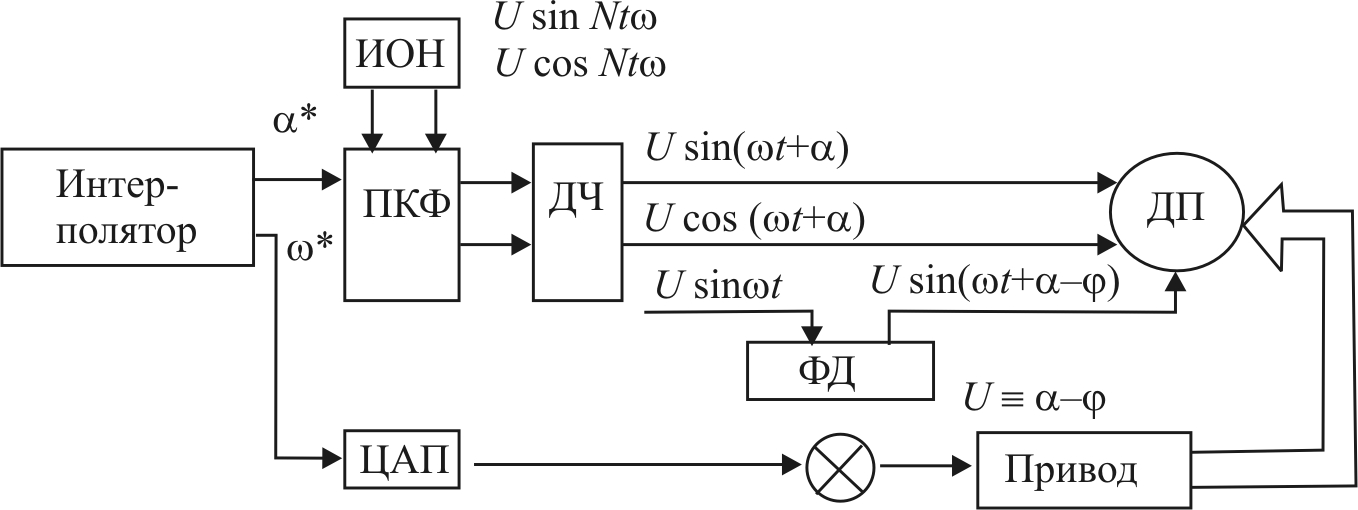
Рис. 10.8. Структура следящего электропривода с фазовым разностным регулятором положения
В амплитудно-индикаторном режиме на датчик подают
Uc1 = U1 sinωt, Uc2 = 0.
C датчика получаем Up1 = U2 sin sinωt, Up2 = U2 cos sinωt.
В амплитудно-разностном режиме
Uc1 = U1 sin sinωt, Uc2 = U1 cos sinωt,
Up1 = U2 sin(–)sinωt, Up2 = U2 cos(–)sinωt.
10.7. Расчетные соотношения для фазовых систем
В фазовых системах опорный сигнал после делителей частоты (см. рис. 10.7)
Uоп = U sinωt,
где ω =
![]() ,
N – коэффициент деления.
,
N – коэффициент деления.
После ПЧФ и делителя частоты
Uвых = U sin(ωt+),
где – задание на перемещение, зависит от числа импульсов интерполятора fинт, которые придут за период опорной частоты.
Одному периоду фазовой системы соответствует перемещение, определяемое датчиком. Например, у линейных индуктосинов шаг датчика 2 мм. Если задана разрешающая способность СЧПУ (чаще 0,01 или 0,001 мм), то становится известно, сколько импульсов с интерполятора должно прийти, чтобы соответствовать периоду датчика.
Это число импульсов
равно N =
![]() ,
,
где L – шаг датчика (мм),
h – разрешающая способность системы (мм).
Для L = 2 мм, h = 0,001 N = 2000.
Именно это число N должно быть задано для делителей частоты (см. рис. 10.7), чтобы привязать период датчика к периоду опорной частоты конкретной СЧПУ.
Реально
максимальная частота
![]() в СЧПУ не превышает 10 кГц (fоп
max
£
20 MГц).
Частота интерполятора не может превышать
fоп
max. Поэтому
при h =
0,001 максимальная рабочая скорость не
превышает Vmax
=
в СЧПУ не превышает 10 кГц (fоп
max
£
20 MГц).
Частота интерполятора не может превышать
fоп
max. Поэтому
при h =
0,001 максимальная рабочая скорость не
превышает Vmax
=
![]() ,
что явно недостаточно.
,
что явно недостаточно.
Иногда
можно хотя бы временно изменить N,
снижая разрешающую способность. Если
N
= 200, то при h
= 0,01, L
= 2 мм Vmax
=
=![]() .
.