

Контрольные вопросы
1. Нарисуйте принципиальную схему одновибратора высокой точности (формирователя импульсов стабильной длительности).
2. Нарисуйте временную диаграмму следования импульсов на выходах делителей частоты, формирователей импульсов и выходной частоты ПКЧ последовательного действия при входном коде 001010.
3. Импульсный фотоэлектрический датчик имеет 5000 имп./об. Диапазон регулирования скорости 10000:1 при nном = 3000 об/мин. Какие методы вы выберите для преобразования количества импульсов в двоичный код? Какая частота квантования должна быть на нижнем диапазоне регулирования скорости?
4. Рассчитайте параметры фильтра низких частот 2-го порядка для ПЧН (датчика скорости вместо тахогенератора) при входной частоте 2 кГц.
5. Приведите виды оптронных пар и их возможности.
6. Как реализовать гальваническую развязку с аналоговыми сигналами на входе и выходе ЭВМ?
7. Как повысить помехозащищенность приемников информации?
7. Управляющие программы счпу
7.1. Структура управляющих программ для станков с чпу
Структура управляющих программ для станков с ЧПУ приведена на рис. 7.1.
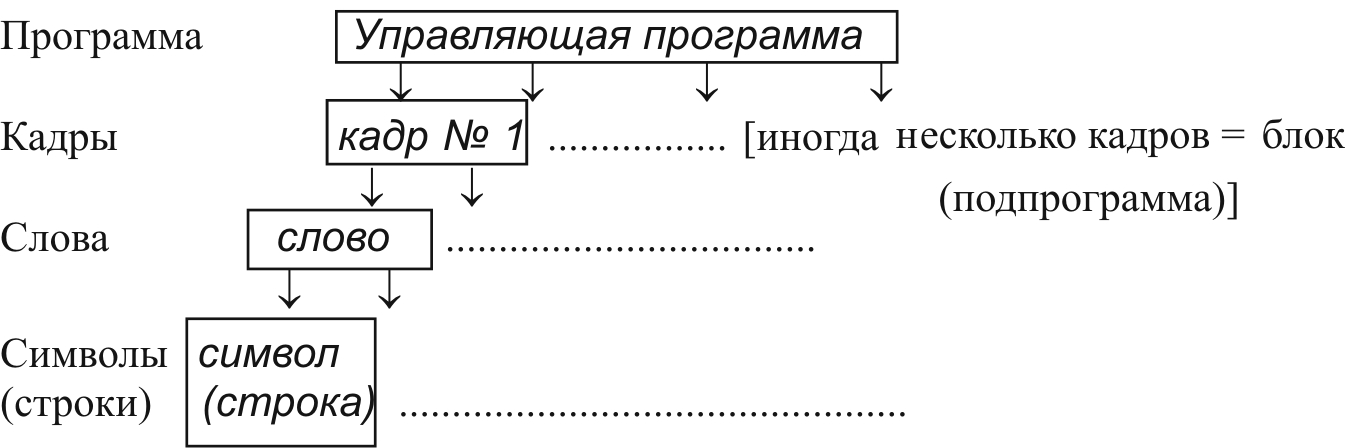
Рис. 7.1. Структура управляющей программы для станков с ЧПУ
Пример кадра управляющей программы:
N001 G60 X0.60 Y- 4.22 F112 S24 T01 M03 ПС
Все символы приводятся в коде ISO-7bit (см. главу 4). Буквенные символы имеют значение адреса, закрепленное постоянно. За буквой следует числовая количественная информация.
Символ раньше записывался в одной строке 8-дорожечной перфоленты, используемой как программоноситель управляющей программы. 8-й бит информации используется для ее контроля (для обеспечения помехозащищенности) – в каждой строке (байте информации) должно находиться и считываться только четное число отверстий. Перфолента – основной программоноситель в СЧПУ, выпущенных до 1985 года, и основной источник сбоев в станках с ЧПУ.
7.2. Значения символов адресов
X, Y, Z – перемещения по x, y, z;
A, B, C – углы поворота вокруг x, y, z;
U, V, W – вторичные перемещения (параллельно x, y, z);
P, Q – третичное перемещение (параллельно x, y);
R – перемещение на быстром ходу по z или третичное перемещение по z;
G – подготовительная функция;
F, E – первая и вторая функции подачи;
S – функция главного движения; N – номер кадра;
М – вспомогательная функция;
T, D – первая и вторая функции инструмента;
I, J, K – параметр интерполяции или шаг резьбы параллельно x, y, z;
L – подпрограмма.
Управляющие символы и знаки
% – начало программы (используется также для остановки носителя данных при обратной перемотке);
LF (ПС) – конец кадра или перевод строки при распечатке;
: – главный кадр УП;
(+,–) – направление перемещения;
– точка (десятичный знак);
/ – пропуск кадра (следующий кадр может обрабатываться или нет в зависимости от положения клавиши на пульте управления);
HUL (ПУС) – пусто (пропуск строки);
() – информация не для обрабатывания (комментарий);
DEL (ЗБ) – забой (УЧПУ не читается).
Дополнительные символы кода ISO-7bit, не используемые в отечественном ГОСТе, но применяемые в зарубежных УЧПУ:
, (запятая), # (диез), * (звездочка), $ (знак доллара), & (коммерческое «И»),;, < > (угловые скобки), =,?, @ (коммерческое «По»), ’ (апостроф), ’’ (кавычки), [ ] (квадратные скобки), DC1 и DC3 – пуск-останов ФСУ, DC2 и DC4 – пуск-останов перфоратора.
В некоторых существующих УЧПУ значения символов отличаются от установленных ГОСТ 20999–83. В последнем даются рекомендации по структуре записи УП, отдельных кадров; рекомендации по значениям G,M,F,S,T и др.
В начале и в конце перфоленты, а также между УП оставляются раккорды (символы HUL (ПУС)) для заправки перфоленты. Затем помещают комментарий (№ чертежа, наименование детали, модель станка с ЧПУ, дату, фамилию технолога-программиста и т.д.). Через 60 символов после комментария помещают ПС.
Начало УП – сочетание символов % и ПС, между которыми можно поместить № УП.
1F (ПС) – конец кадра.
Конец УП обозначается вспомогательной функцией МО2.