

6.4. Преобразователь «унитарный код – фаза»
Одна из схем преобразователя «унитарный код – фаза» приведена в книге Ильина О.П. Системы программного управления промышленными установками и РТК (Минск: Высш. шк., 1998). Преобразователь работает по принципу сложения или вычитания импульсов опорной частоты и частоты входного кода (рис. 6.8).
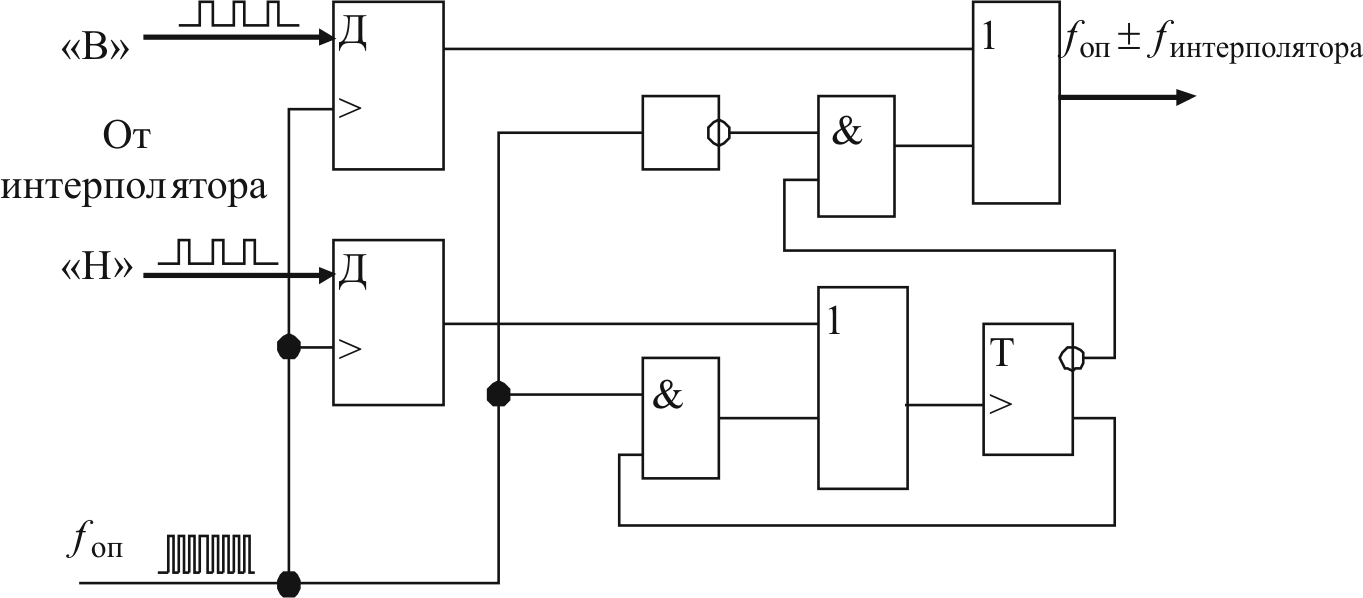
Рис. 6.8. Принципиальная схема преобразователя «унитарный код – фаза»
Импульсы «В» и fоп идут на выход сразу (триггер «разрешает» прохождение импульсов fоп).
С приходом импульса «Н» триггер перебрасывается и не разрешает прохождение очередного импульса fоп на выход. Но этот очередной импульс fоп возвращает триггер в исходное положение.
D-триггеры предназначены для привязки импульсов «В», «Н» к фронту импульсов fоп (стробирование сигналов «В», «Н»).
6.5. Преобразователь «фаза – код»
Принцип работы данного преобразователя дан на рис. 6.9.
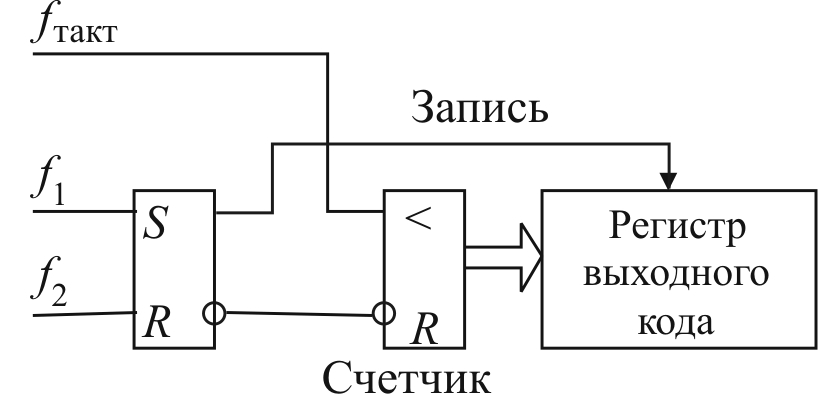
Рис. 6.9. Принцип работы преобразователя «фаза – код»
Счетчик запускается на время выделенной фазы.
6.6. Преобразователь «фаза – напряжение»
Подобный преобразователь называют также фазовым детектором, фазовым дискриминатором. Принцип его работы показан на рис. 6.10, временная диаграмма – на рис. 6.11, выходная характеристика – на рис. 6.12:
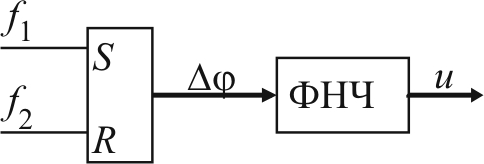
Рис. 6.10. Принцип работы преобразователя «фаза – напряжение»
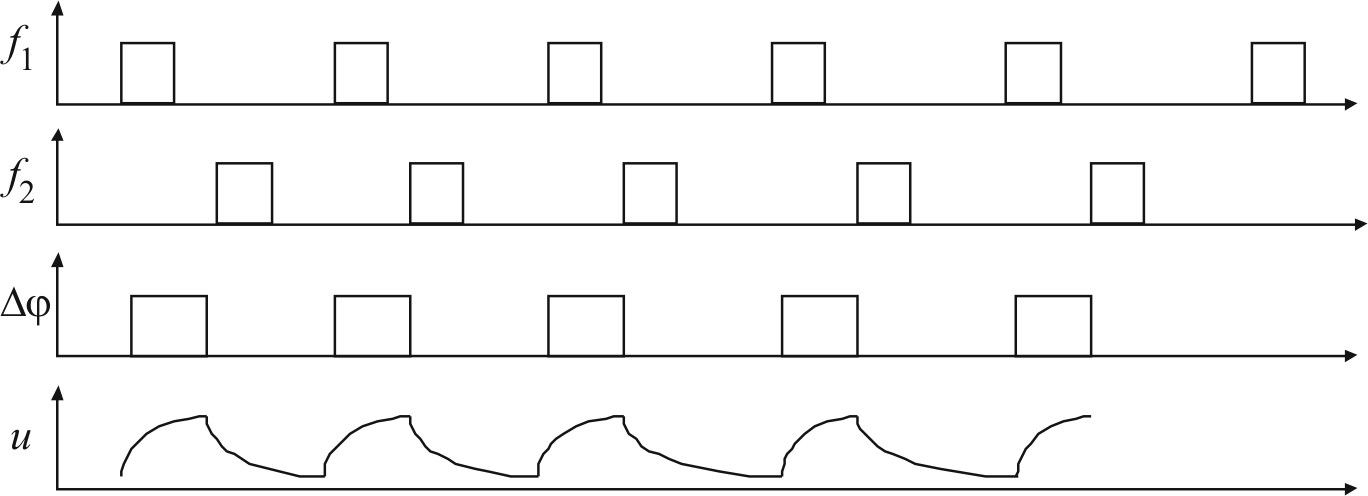
Рис. 6.11. Временная диаграмма преобразователя «фаза – напряжение»
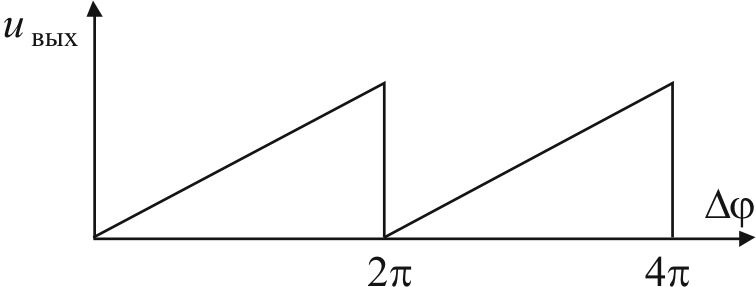
Рис. 6.12. Выходная характеристика преобразователя «фаза – напряжение»
6.7. Узлы гальванической развязки в системах автоматизации
а
б
в
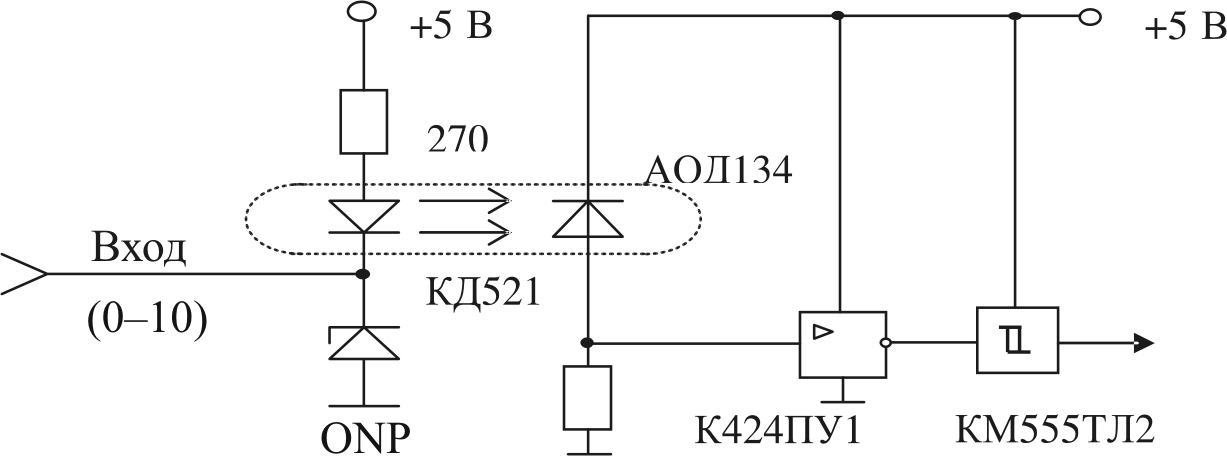
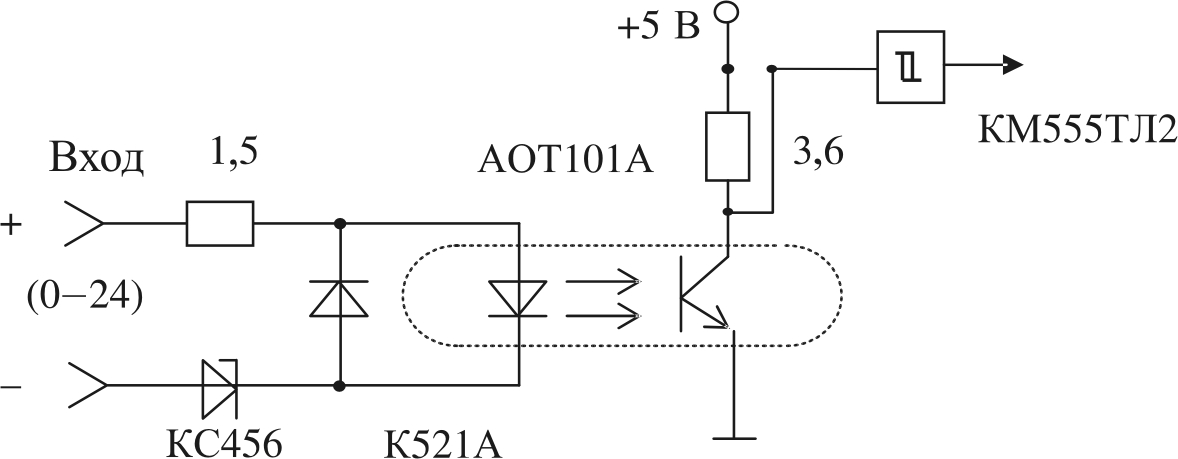
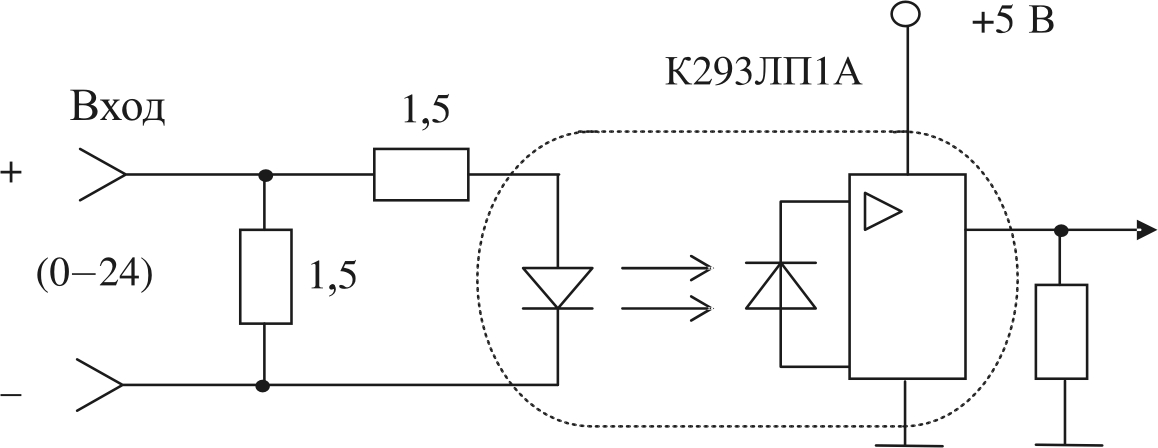
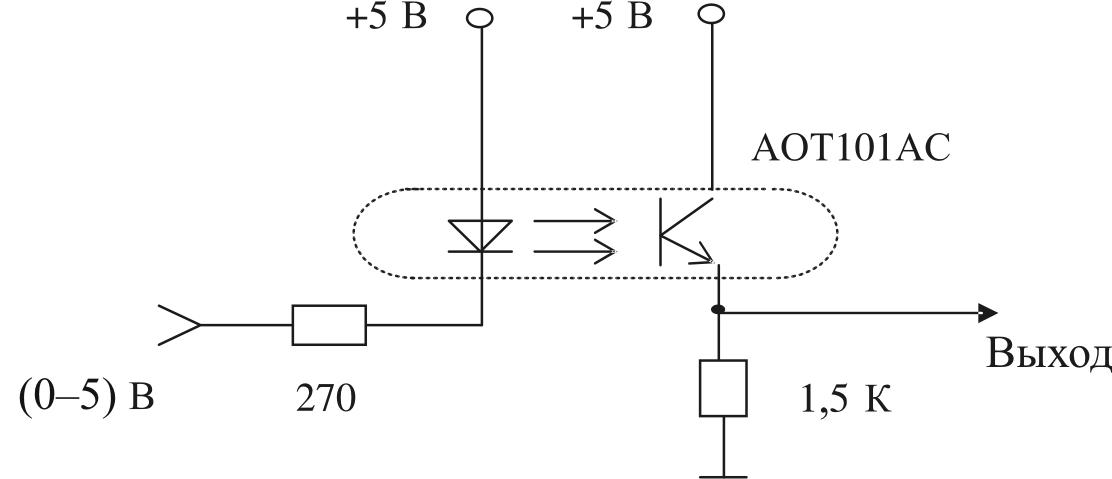
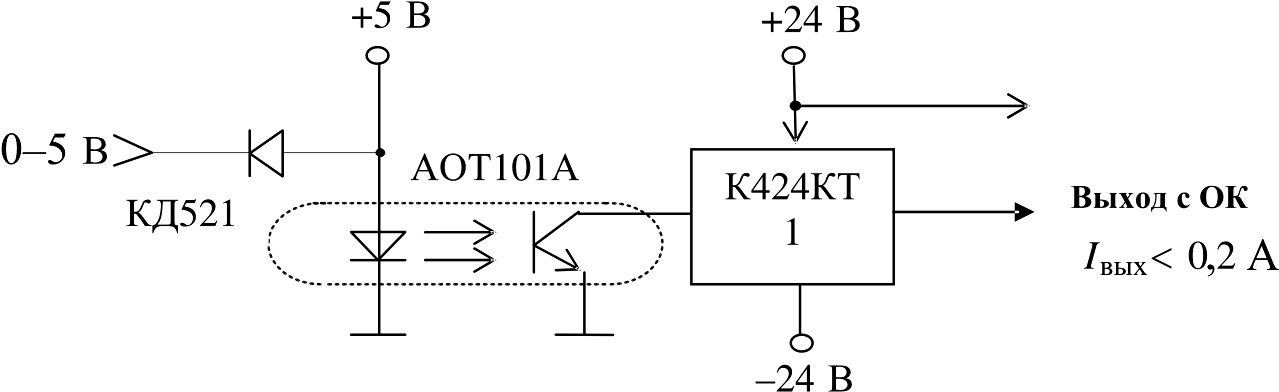
Рис. 6.13. Гальваническая развязка при вводе сигналов: а) диодная оптопара с усилителем и триггером Шмидта; б) транзисторная оптопара с триггером Шмидта; в) оптопара со встроенным усилителем
а
б
в
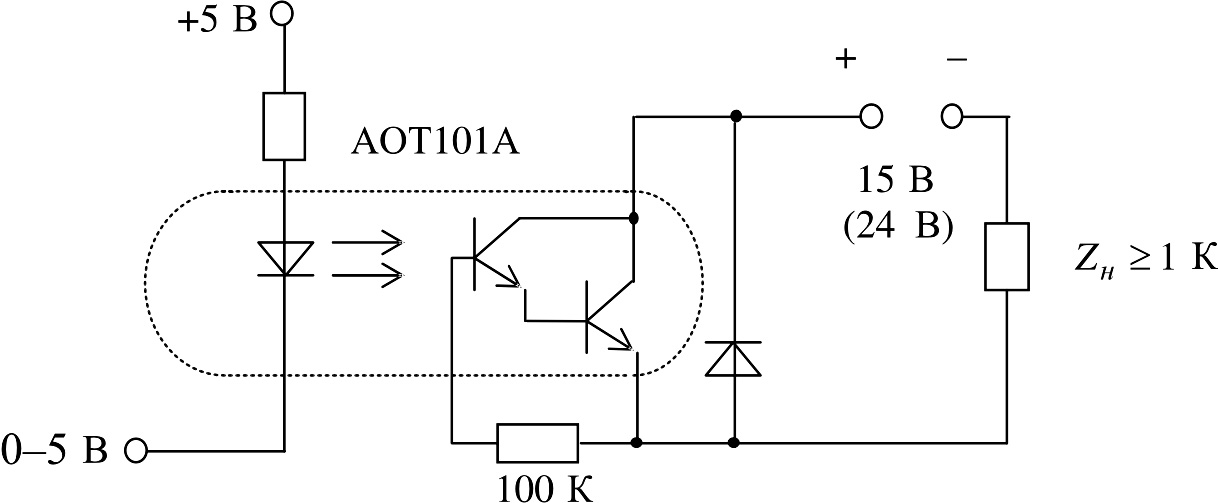
Рис. 6.14. Гальваническая развязка при выводе сигналов: а) транзисторная оптопара с малой выходной мощностью; б) транзисторная оптопара с выходным усилителем мощности; в) транзисторная оптопара средней мощности
Все дискретные сигналы, вводимые с периферии в модули систем автоматизации и выводимые из модулей, должны быть обязательно гальванически развязаны для повышения помехозащищенности. Аналоговые сигналы при вводе сначала преобразуются в дискретную форму, а затем тоже поступают на узлы гальванической развязки. Дискретный сигнал, следующий на ЦАП для последующего вывода аналогового сигнала, также гальванически развязывается. Естественно, источники питания внутренних потребителей и внешних потребителей различны (гальванически развязаны).
Схемы гальванической развязки для входных сигналов изображены на рис. 6.13, а, б, в.
Диодная оптопара требует обычно усилителя на своем выходе (см. рис. 6.13, а). Данный усилитель используется и как формирователь ТТЛ уровня сигналов. Лучшее решение – это встроенный в оптопару усилитель (см. рис. 6.13, в). Как правило, для повышения помехозащищенности и защиты от дребезга входного сигнала (контакты реле, конечных выключателей и т.д.) применяется триггер Шмидта. Иногда защита от дребезга встроена во входной контроллер электроавтоматики (СБИС К1801 ВП1-016). Тогда триггер Шмидта не устанавливается.
Выходные узлы гальванической развязки изображены на рис. 6.14, а, б, в.
При малой выходной нагрузке, например при работе на ЦАП, можно использовать транзисторную оптопару без усилителя (см. рис. 6.14, а), оптопару АОТ110А можно также использовать без усилителя с работой на нагрузку с большим входным сопротивлением (см. рис. 6.14, в).
Иначе необходимо использовать выходные усилители (токовые ключи) для преобразования напряжения и усиления по току (см. рис. 6.14, б).
Все шесть схем используются в одной СЧПУ МС2101.
Схема на рис. 6.13, а: входы с ФЭД СЧПУ МС2101.
Схема на рис. 6.13, б: входы с электроавтоматики СЧПУ МС2101.
Схема на рис. 6.13, в: входы с электроавтоматики СЧПУ 2С, 2Р, 2У; входы с телеграфного канала ИРПС СЧПУ МС2101.
Схема на рис. 6.14, а: выходы на ЦАП СЧПУ МС2101.
Схема на рис. 6.14, б: выходы на электроавтоматику СЧПУ МС2101.
Схема на рис. 6.14, в: выходы на электроавтоматику СЧПУ 2С, 2Р, 2У, на телеграфные каналы МС2101.