

6.3. Преобразователь «код – частота»
Имеются два принципа преобразования:
последовательного преобразования (управляемый кодом делитель частоты);
параллельного преобразования на основе сумматоров.
Микросхема К155ИЕ8 является преобразователем «код – частота» (управляемый кодом делитель частоты). Структура микросхемы дана на рис. 6.6. Входной двоичный шестиразрядный код управляет коэффициентом деления тактовой частоты. Выходная частота
fвых
=
![]() (Е5·25+Е4·24+Е3·23+Е2·22+Е1·21+Е0·20),
(Е5·25+Е4·24+Е3·23+Е2·22+Е1·21+Е0·20),
где Е0–Е5 – данные битов двоичного кода («1» или «0»).
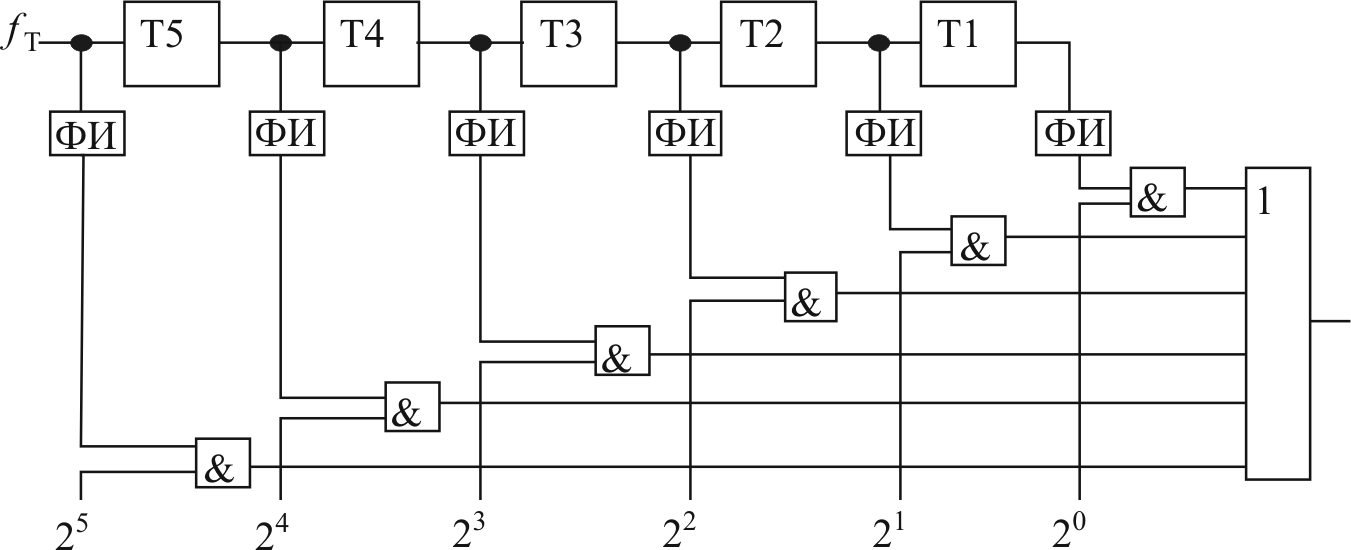
Рис. 6.6. Структура микросхемы К155ИЕ8
Формирователи импульсов – одновибраторы по переднему фронту импульсов.
Последовательное
соединение микросхем позволяет наращивать
разрядность входного двоичного кода.
Фактически в микросхеме происходит
суммирование частот, пропорциональных
весу соответствующего разряда двоичного
кода
![]() при наличии в бите единицы.
при наличии в бите единицы.
Структура преобразователя «код – частота» параллельного действия изображена на рис. 6.7. Данные в регистры записываются по переднему фронту импульсов.
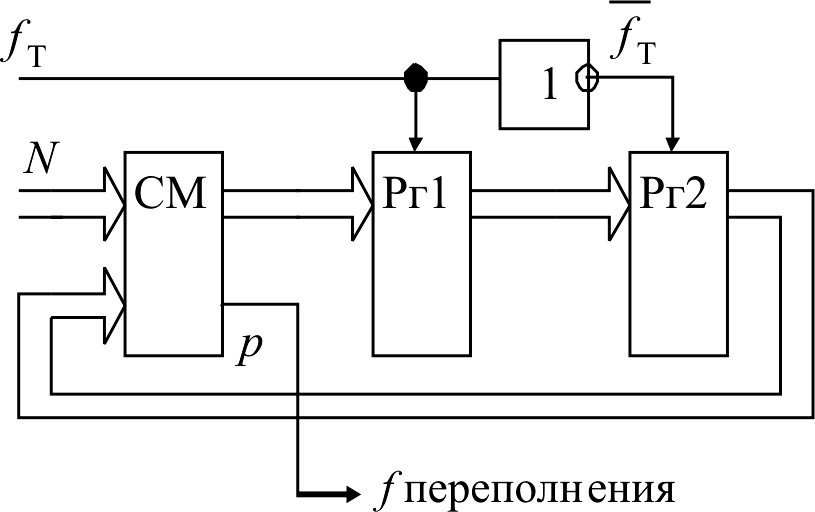
Рис. 6.7. Структура преобразователя «код – частота»
Пусть емкость сумматора 1000, N = 300. Состояние на выходе переполнения сумматора, регистров Рг1, Рг2 с приходом фронтов импульсов fT изменяется, как приведено в табл. 6.1.
При этом fвых
=
![]() .
.
Таблица 6.1
Последовательность преобразования в ПКЧ параллельного действия
№ п/п |
fT |
|
Выход Рг1 |
Выход Рг2 |
f переполнения |
1 |
+ |
+ |
300 |
300 |
|
2 |
+ |
+ |
600 |
600 |
|
3 |
+ |
+ |
900 |
900 |
импульс |
4 |
+ |
+ |
200 |
200 |
|
5 |
+ |
+ |
500 |
500 |
|
6 |
+ |
+ |
800 |
800 |
импульс |
7 |
+ |
+ |
100 |
100 |
|
Преобразователи параллельного действия имеют больше функциональных возможностей. Применив дополнительно сумматор между регистрами Рг1 и Рг2, можно вносить коррекцию в каждом такте и в каждом периоде переполнения. Можно при этом работать как в двоичном, так и в двоично-десятичном коде. Это широко используется в аппаратных стойках ЧПУ.
Оба типа ПКЧ имеют на выходе частоту с неравномерно следующими во времени импульсами. Это в ряде случаев недопустимо. Обычно неравномерность уменьшается до допустимого уровня за счет неуправляемых делителей частоты на выходе ПКЧ с одновременным увеличением fT в соответствующее число раз. Коэффициент деления «6» достаточен в большинстве случаев для неуправляемого делителя частоты.