

5.4. Цифроаналоговый процессор км1813ве1
В микросхему включены:
на входе 8-разрядный АЦП последовательных приближений;
ОЗУ – 40 ячеек по два 25-разрядных слова;
ППЗУ с ультрафиолетовым стиранием для хранения команд (команды «Электроника-60»);
выход – 8-разрядный ЦАП.
Таким образом, имеем цифровую обработку вводимых аналоговых сигналов, на выходе снова аналоговые сигналы.
Широко используется в аппаратуре низкочастотной связи, измерительной технике, устройствах распознавания речи, образов, обработки акустических голограмм, в биомедицинской аппаратуре, автомобильной электронике и т.д.
Контрольные вопросы
1. Нарисуйте схему резисторной матрицы R-2R, применяемую в 8-разрядном ЦАП.
2. Для каких целей используются:
тристабильные выходы ИМС;
выходы ИМС с открытым коллекторным выходом.
3. Покажите состояние регистра последовательных приближений в 8 тактах взвешивания 8-разрядного АЦП при UREF = 10,24 B, Uвх = 4,01 В.
4. Укажите сферу применения АЦП параллельного считывания и интегрирующих АЦП.
5. Почему в ЦАП и АЦП используются преобразователи на 6–12 разрядов. Сколько разрядов Вы выберите в конкретном случае?
6. Сколько компараторов в 6-разрядном АЦП параллельного считывания?
6. ПреобразоваТели информации
6.1. Преобразователь «частота – напряжение»
Структура стандартного преобразователя «частота – напряжение» представлена на рис. 6.1.
![]()
Рис. 6.1. Структура стандартного преобразователя «частота – напряжение»
ФИСД – формирователь импульсов стабильной длительности (одновибратор).
ФИСА – формирователь импульсов стабильной амплитуды.
ФНЧ – фильтр низких частот.
Временная диаграмма работы преобразователя приведена на рис. 6.2.
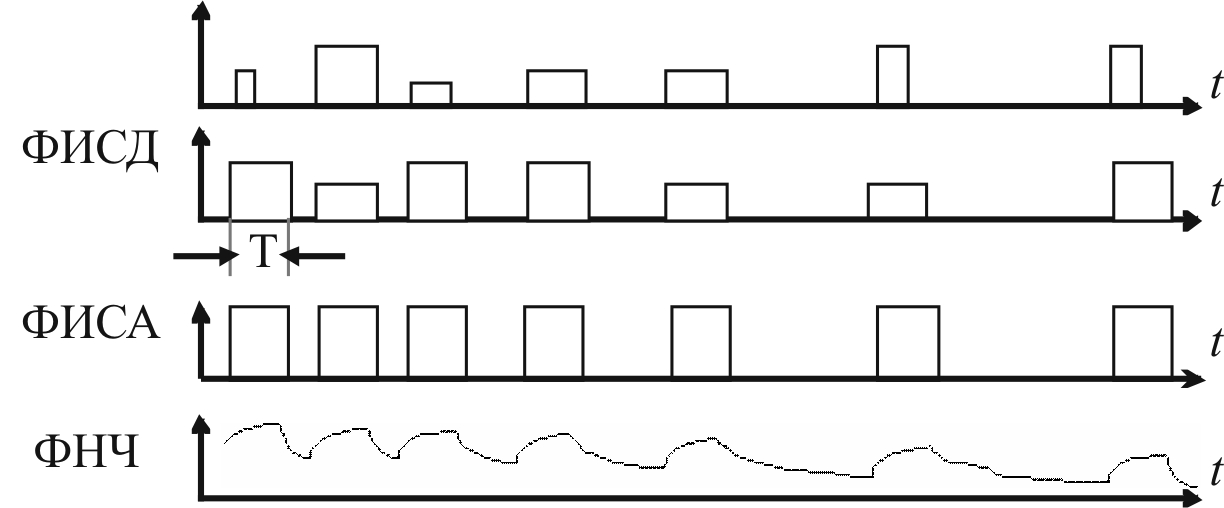
Рис. 6.2. Временная диаграмма работы преобразователя «частота – напряжение»
Одновибратор обычно выполняется на счетчике заполнением его тактовой частотой (рис. 6.3).
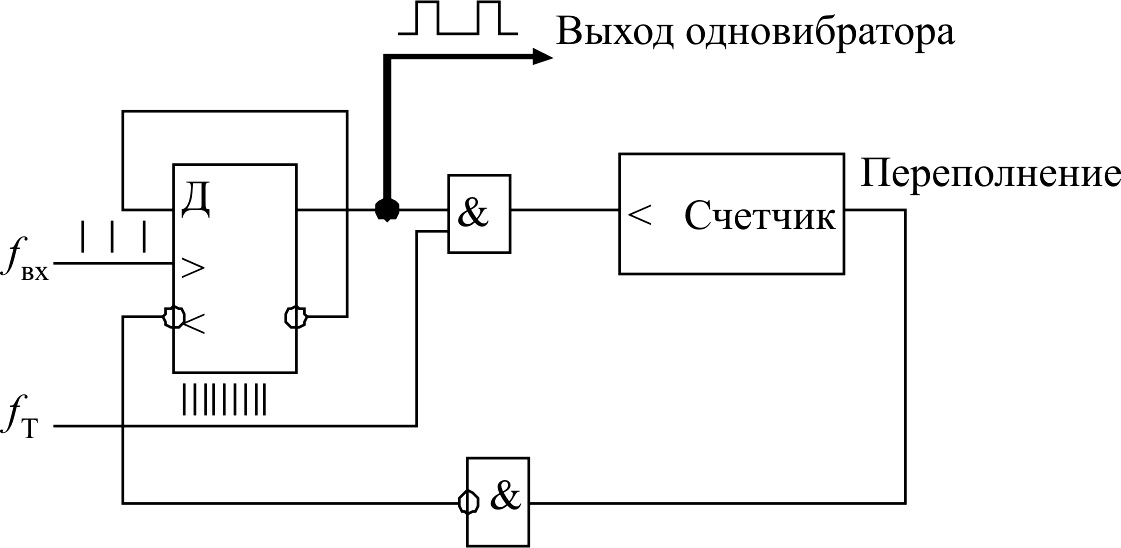
Рис. 6.3. Структура формирователя импульсов стабильной длительности
Формирователи импульсов стабильной длительности выполняются на любом ключевом элементе с питанием его стабильным напряжением.
Принципиальная
схема фильтра низкой частоты второго
порядка изображена на рис. 6.4. Его
передаточная функция W(p)
= ,
где Т = RC.
,
где Т = RC.
Рис. 6.4. Принципиальная схема фильтра низкой частоты второго порядка |
Существует интегральный преобразователь «напряжение – частота» типа К1108ПП1, обеспечивающий при Uвх = 0…10 В выходную частоту 0,01…10 кГц (возможно до 500 кГц). Временная диаграмма изменения выхода интегратора при входных сигналах Uинт1 или Uинт2 представлена на рис. 6.5. |
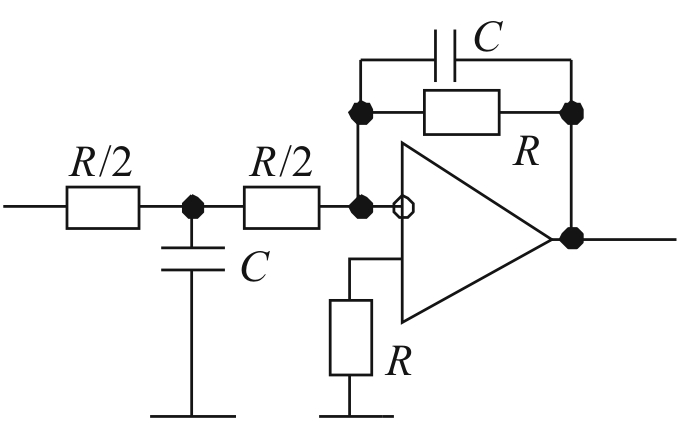
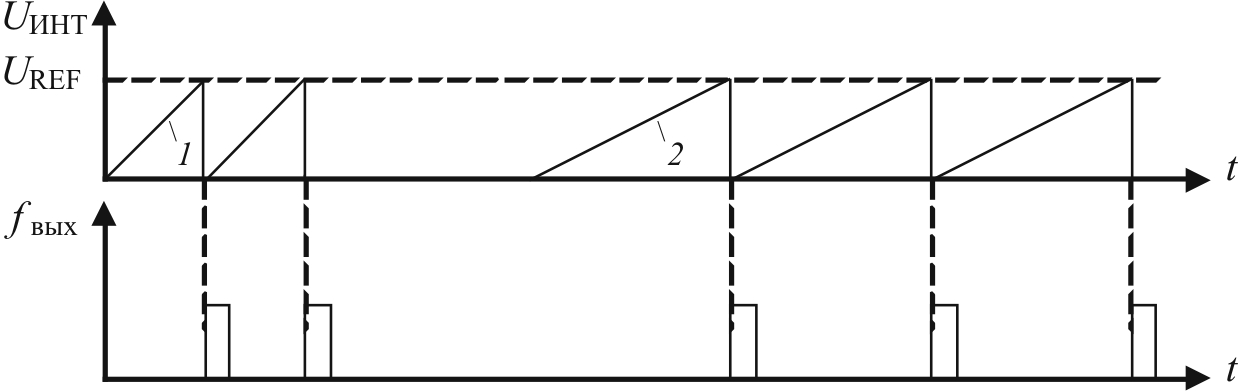
Рис. 6.5. Временная диаграмма изменения выхода интегратора при входных сигналах Uинт1 или Uинт2
Эту же микросхему
можно использовать как ПЧН. Входная
частота подается на одновибратор, сигнал
последнего на интегратор, являющийся
в данном случае фильтром
![]() .
.
6.2. Преобразователь «частота – код»
Существуют два способа преобразования:
подсчет количества импульсов измеряемой частоты за стабильный период тактовой частоты;
подсчет количества импульсов тактовой частоты за период измеряемой частоты.
1-й способ более распространен. Однако при большом диапазоне изменения измеряемой частоты количество подсчитываемых импульсов может быть ничтожно мало.
Пример:
Требуемый по ГОСТу диапазон регулирования скорости следящих приводов 10 000:1.
Фотоэлектрические импульсные датчики имеют обычно 2500 имп./об. При подсчете импульсных последовательностей датчика обычно происходит учетверение импульсов, т.е. общее количество посчитанных импульсов на оборот равно 10 000 имп./об.
Примем номинальную скорость двигателя подач 3000 об/мин = = 50 об/с.
Требуемый интервал квантования в микропроцессорных СЧПУ примем 10 мс.
На номинальной скорости количество импульсов за период квантования равно 50 об/с 10 000 имп./об /100 квант/с = 5000 имп./квант. При минимальной скорости количество импульсов за период квантования равно 5000/10 000 = 0,5 имп./квант, или 50 имп./с.
Учитывая, что полоса пропускания тиристорных электроприводов не превышает 30 рад/с, т.е. не более 5 Гц, дискретность 50 имп./с позволяет практически не проявляться в непрерывной части тиристорного электропривода. Однако в транзисторных электроприводах с полосой пропускания более 100 Гц данная дискретность приведет к запаздыванию, явлению «шагания» и ухудшению качества обработанной поверхности.
Недостатки второго способа:
требуется высокая стабильность периодов измеряемой частоты, что не всегда реализуется для вращающихся датчиков;
выходной код обратно пропорционален измеряемой частоте.
В настоящее время имеются и интегральные преобразователи «частота – код». Например, СБИС К1801ВП1-015 (схема описана в пособии по дисциплине «Микропроцессорные устройства) и ряд других.