

5.2. Цифроаналоговые преобразователи (цап)
Требуются ЦАП и АЦП с различными характеристиками:
число разрядов от 8 до 20;
время преобразований от 0,01 мкс до 1 с.
Интегральные ЦАП исполняются, как правило, по весовому принципу (рис. 5.5). ЦАП содержит резисторную матрицу R-2R и токовые ключи ТК. На вход ОУ поступает сумма токов тех разрядов двоичного числа, где есть единица. Токи определяются только резисторной матрицей. Если учесть то, что потенциал на входе ОУ равен нулю (при Kу → ), то весовая матрица получает вид, представленный на рис. 5.6. Сопротивление матрицы равно R.

Рис. 5.5. ЦАП, реализованный по весовому принципу на резисторной матрице R-2R
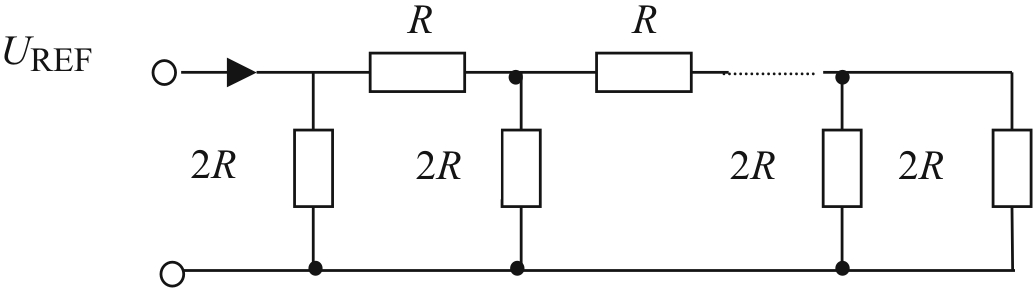
Рис. 5.6. Результирующее сопртивление резисторной матрицы
Откуда
![]() ,
где
,
где
![]() – опорное напряжение (обычно
– опорное напряжение (обычно
![]() ,
чтобы иметь вес младшего разряда 10 мВ).
,
чтобы иметь вес младшего разряда 10 мВ).
Сопротивления для выходного операционного усилителя тоже входят в состав прецизионных поликремниевых резисторов микросхемы.
Время преобразования не более 5 мкс.
Микросхема К572ПА2 (рис. 5.7) позволяет преобразовывать 12 разрядов, содержит более 1000 элементов. В состав микросхемы входят:
УЦ – согласователь уровня ТТЛ с КМОП уровнем.
RG1, RG2 – регистры памяти для записи и хранения цифровой информации.
ТК – токовые ключи.
РМ – резисторная матрица, разрешающая способность H = 2,5 мВ при ,
 ,
,
 ,
,
 .
.
Время преобразования – не более 15 мкс.
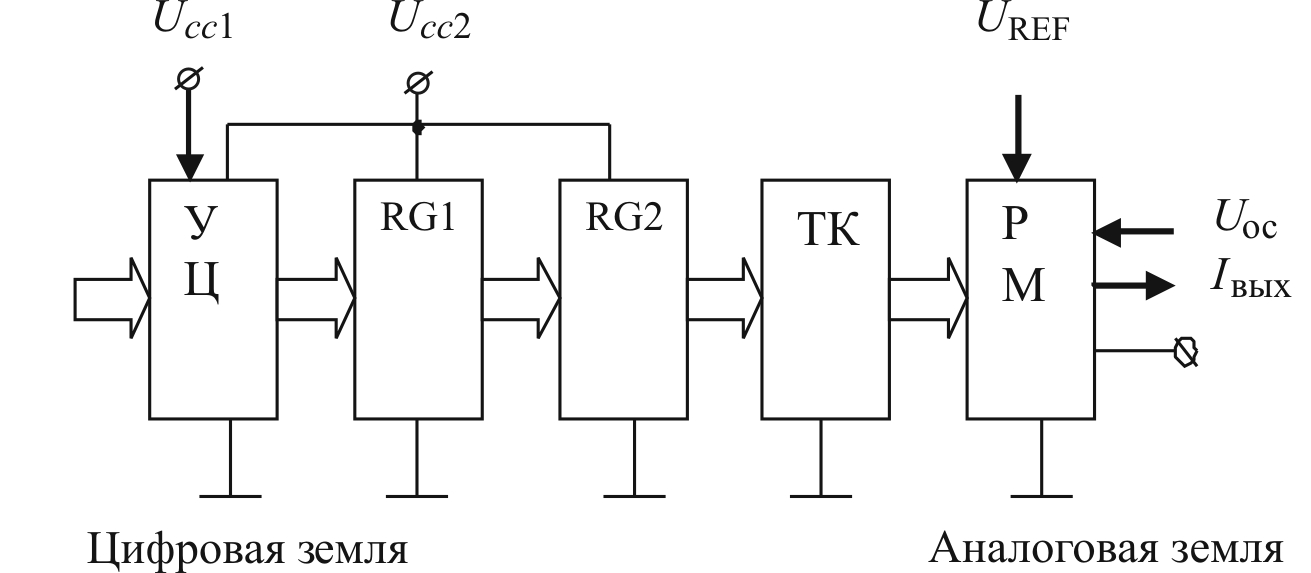
Рис. 5.7. Структура микросхемы ЦАП К572ПА2
Микросхема К594ПА1: 12-разрядная со встроенным источником тока на основе ОУ для повышения стабильности, tуст = 3,5 мкс.
Микросхема К1108ПА1: 12-разрядная, tуст = 0,4 мкс.
Микросхема К1118ПА: 8-разрядная, tуст = 40 нс.
Микросхема К1118ПА2: 10-разрядная, tуст = 80 нс.
5.3. Аналого-цифровые преобразователи (ацп)
Принципы исполнения АЦП:
последовательного счета;
последовательных приближений;
параллельного считывания;
интегрирующие.
Принцип работы АЦП с последовательным счетом представлен на рис. 5.8.
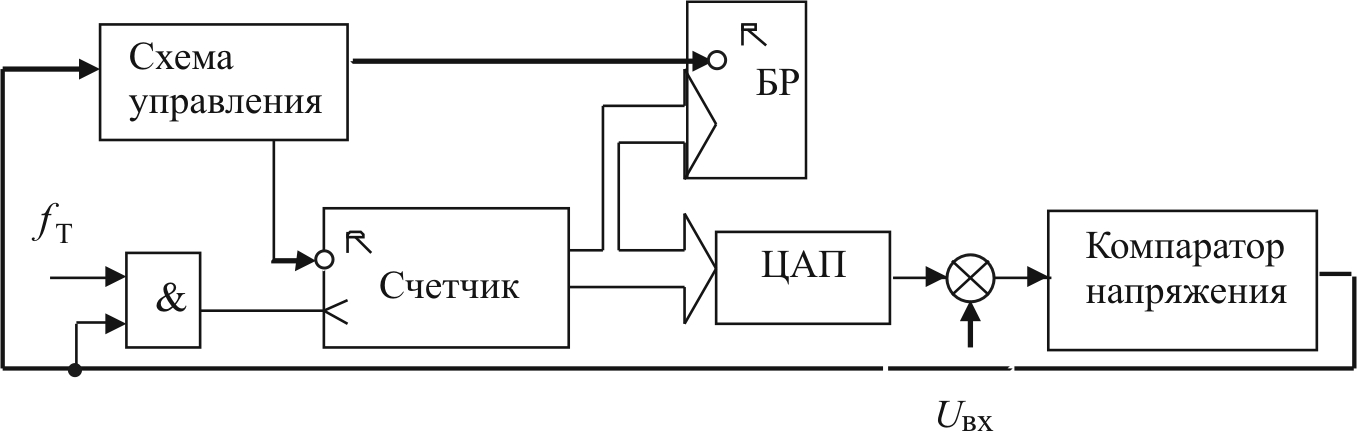
Рис. 5.8. Структура АЦП с последовательным счетом
Заполнение счетчика тактовой частоты до тех пор, пока выходное напряжение ЦАП, полученное при преобразовании кода счетчика, не сравняется с входным напряжением. Данный принцип применялся, когда не было интегральных АЦП.
В интегральных АЦП применяются три последних принципа.
Структура АЦП, выполненного по методу последовательных приближений, дана на рис. 5.9.
По этому методу сдвиговый регистр поочередно добавляет единицу в разряды регистра последовательных приближений, начиная со старшего. Если компаратор напряжения при этом отмечает, что напряжение ЦАП больше Uвх, то эта очередная единица в регистрах не фиксируется (иначе – фиксируется). Таким образом происходит «взвешивание» всех разрядов двоичного кода.
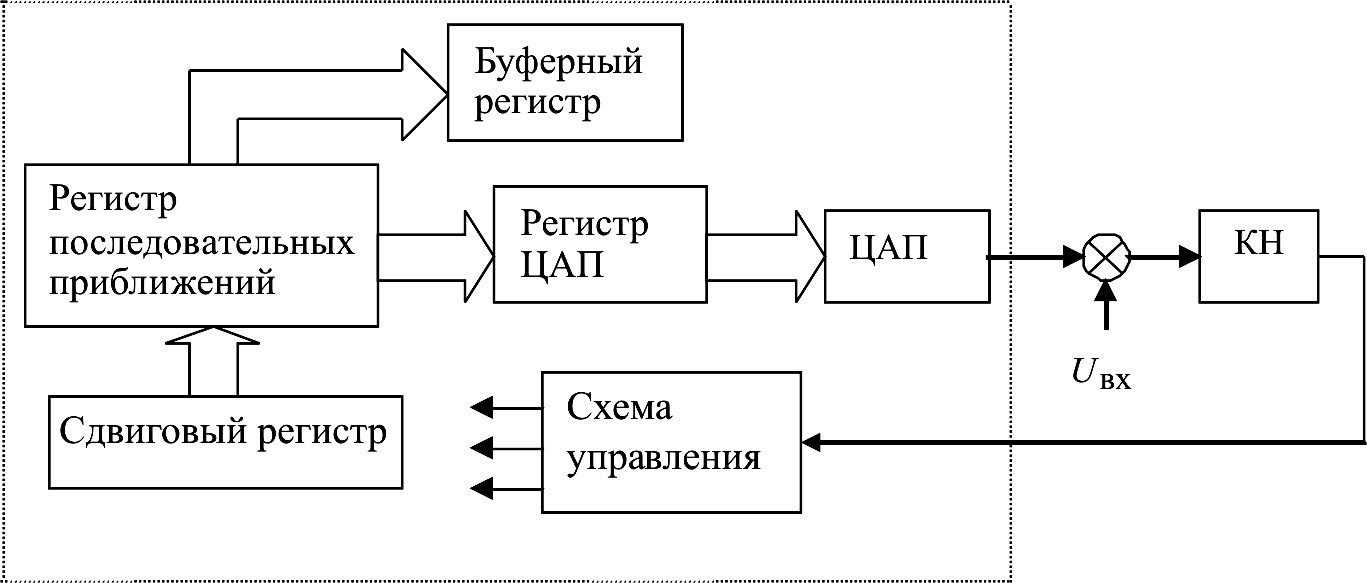
Рис. 5.9. Структура АЦП по методу последовательных приближений
Для получения 12-разрядного кода при , примененного для ЦАП, каждому разряду кода соответствует аналоговый сигнал (табл. 5.2).
Таблица 5.2
Последовательность преобразования АЦП
Такт
|
Вес ЦАП в этом такте |
Код в регистре последовательных приближений |
Выход ЦАП |
Результат накапливаемый |
1 2 3 4 5 6 7 8 9 10 11 12 |
5,12 2,56 1,28 0,64 0,32 0,16 0,08 0,04 0,02 0,01 0,005 0,0025 |
100000000000 110000000000 111000000000 110100000000 110010000000 110011000000 110010100000 110010010000 110010011000 110010010100 110010010110 110010010101 |
5,12 7,68 8,96 8,32 8,00 8,16 8,08 8,04 8,06 8,05 8,055 8,0525 |
100000000000 110000000000 110000000000 110000000000 110010000000 110010000000 110010000000 110010010000 110010010000 110010010100 110010010100 110010010100 |
В этой таблице
показаны все 12 тактов последовательного
взвешивания для
![]() .
.
Буферный регистр обычно имеет три стабильных состояния выходов, может выдавать информацию побайтно или 16-разрядным словом, в параллельном коде или последовательном по сигналам на считывание.
Внешний компаратор напряжения применяют для того, чтобы повысить точность.
Примеры АЦП последовательных приближений.
К572ПВ1 – 12-разрядный,
 .
.К572ПВ3 – 8-разрядный внутренний компаратор,
 .
.К1108ПВ1 – 10-разрядный, внутренние компаратор и источник опорного напряжения,
 ,
Uвх
= 0…3 В.
,
Uвх
= 0…3 В.К1108ПВ2 – 12-разрядный, Uвх = 0…5 В,
 .
.К1113ПВ1 – 10-разрядный,
 .
.К574ПВ4 – 8-разрядный, 8 входов (есть мультиплексор на входе), ОЗУ 8×8, считывание ОЗУ внешним устройством (микропроцессором).
АЦП параллельного считывания
Это наиболее быстродействующие преобразователи, так как сравнение с делителем напряжения, имеющим 2n ступеней, где n – разрядность АЦП, происходит каждый такт. Структура подобного АЦП приведена на рис. 5.10.
С компараторов следует позиционный код, когда верхние компараторы будут все в «1», нижние – в «0». Позиционный код преобразуется в двоичный код.
Примеры АЦП параллельного считывания:
К1107ПВ1 – 6-разрядный, Uвх = 0…2 В,
 .
.К1107ПВ2 – 8-разрядный (уже 256 компараторов), .
К1107ПВ3 (ЭСЛ структура) – 6-разрядный,
 .
.К1107ПВ4 – 8-разрядный,
 .
.К1126ПВ1 – двухканальный АЦП – 3-разрядные (для электронного щитка автомобиля).
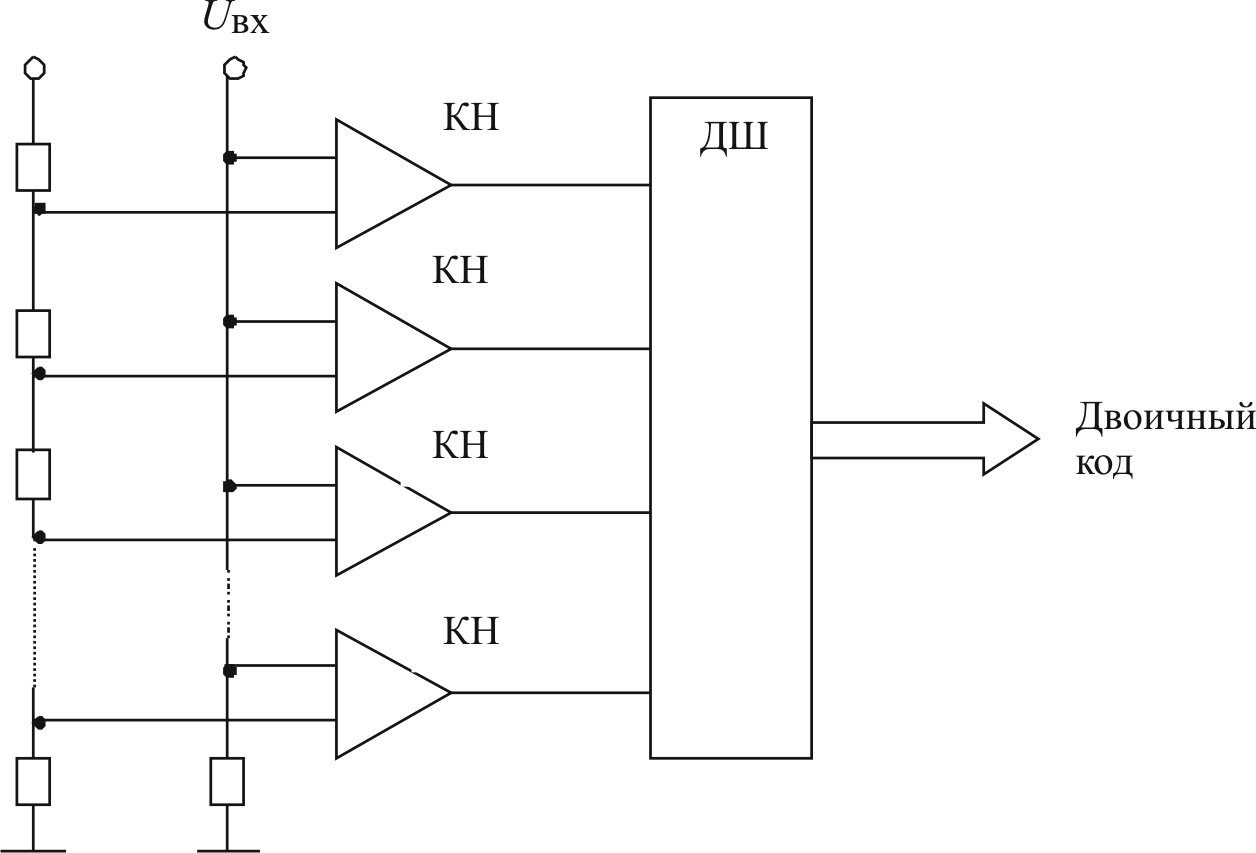
Рис. 5.10. Структура АЦП параллельного считывания
Интегрирующие АЦП
Наименьшее быстродействие, но простота, выход сразу на индикацию. Осуществляется двойное интегрирование с автоматической коррекцией нуля и определением полярности сигнала. Структурная схема интегрирующего АЦП приведена на рис. 5.12, временная диаграмма работы – на рис. 5.11.
На 1-м этапе интегратор заряжается от Uвх со стабильной длительностью. На 2-м отрезке интегратор разряжается от стабильного источника UREF, ведется подсчет времени разряда Tх. На третьем отрезке производится компенсация дрейфа нуля интегратора. Все временные отрезки отмеряются путем подсчета тактовых импульсов счетчиком.
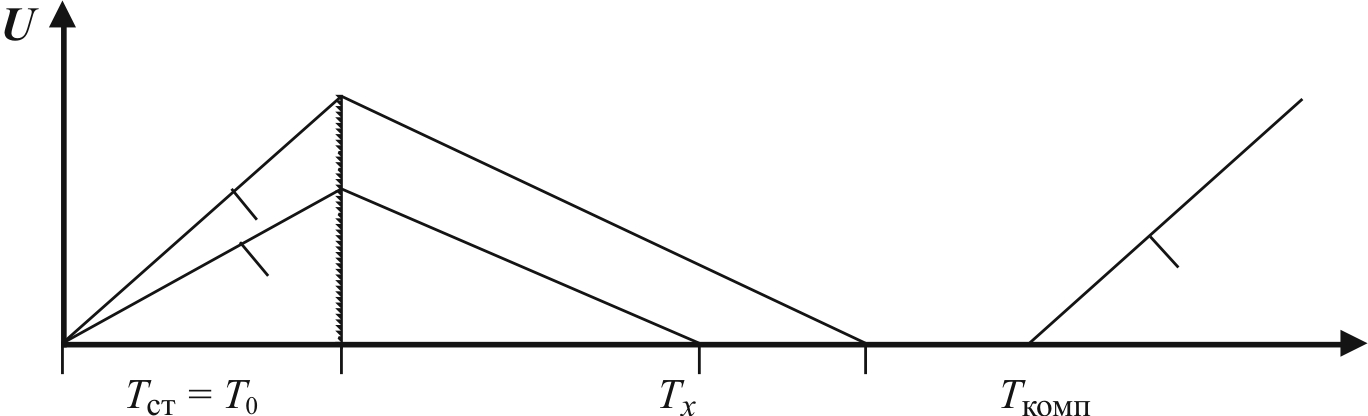
Рис. 5.11. Временная диаграмма работы интегрирующего АЦП
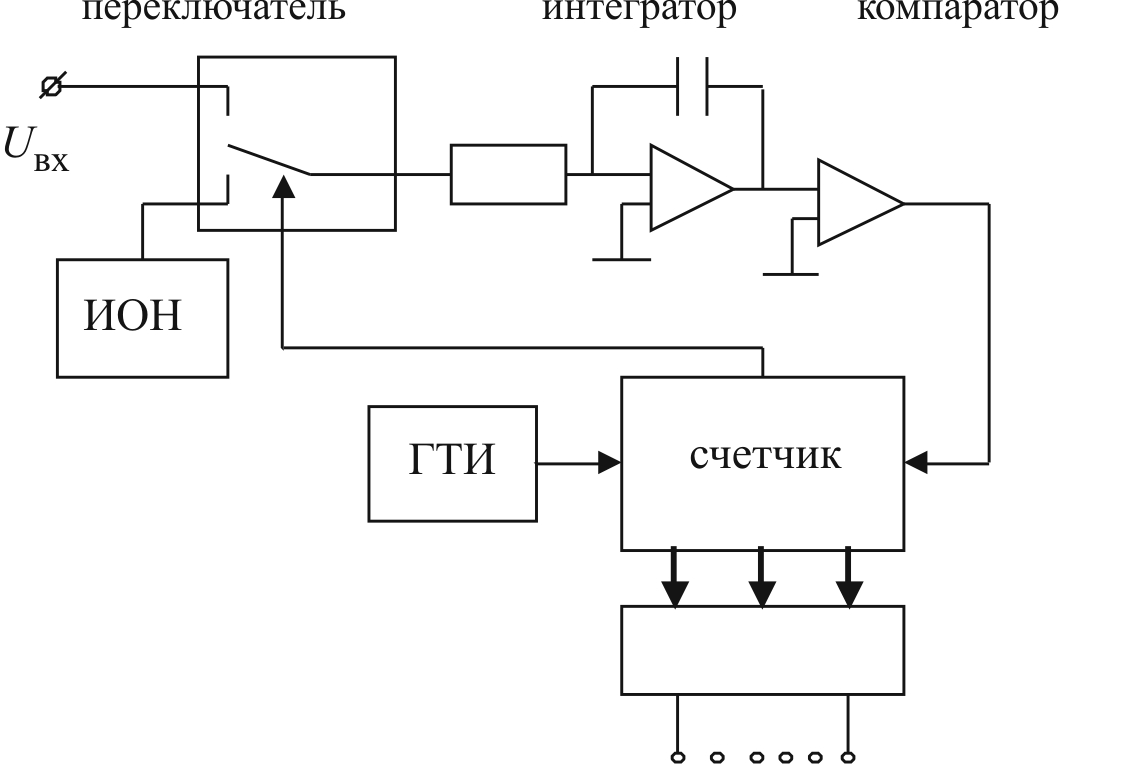
Рис. 5.12. Структура интегрирующего АЦП: ИОН – источник опорного напряжения; ГТИ – генератор тактовых импульсов
Учитывая равенство заряда и разряда:
![]() .
Принимая Ux = const
за период интегрирования, получаем
.
Принимая Ux = const
за период интегрирования, получаем
![]() ,
т.е.
,
т.е.
![]()
Пример интегрирующего АЦП:
К572ПВ2 – выходной код, специальный для непосредственного управления 7-сегментным десятичным индикатором на 3,5 декады (до 4999).
Здесь не требуются ЦАП с высокоточными резисторными матрицами, нет высоких требований к стабильности интегратора, тактовой частоты (увеличение fT приводит к уменьшению Tст, но тогда меньше будет и время разряда). Схема позволяет хорошо подавить сетевые помехи (входной сигнал измеряется как среднее за Tст).
К572ПВ1, К572ПВ2 – tзар = 4103 периодов fT;
tразр mах = 8103 периодов fT;
tавтокомп ≈ 4103 периодов fT или 16103 fT;
fT кратна 50 Гц (50, 100, 200 кГц);
При fT = 200 кГц цикл работы t∑ = 16103/ fT = 80 мс.
При δ < 0,1 % высокая помехозащищенность и дешевизна.