

4.3. Цифровые коды
Цифровые коды
служат для записи как дискретной
(численной) информации, так и буквенной.
В табл. 4.3 приведены десятичные,
восьмеричные, шестнадцатеричные коды
для записи как цифр, так и буквенных
и символьных элементов. Цифровой код –
позиционный, т.е. значение кода зависит
от места (позиции), которое занимает та
или иная цифра. Число в позиционном коде
определяется по формуле
![]() ,
где i – номер разряда;
,
где i – номер разряда;
![]() –
цифра, стоящая в i-м разряде; a –
основание системы счисления. В табл.
4.3 представлены основные цифровые коды
для десятичного числа 23,5. В этой таблице
показано, как можно преобразовать
десятичное число в двоично-десятичное
и из двоичного просто получить
восьмеричное или шестнадцатеричное
(символы 8-го числа от 0 до 7, символы
16-го: 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F).
–
цифра, стоящая в i-м разряде; a –
основание системы счисления. В табл.
4.3 представлены основные цифровые коды
для десятичного числа 23,5. В этой таблице
показано, как можно преобразовать
десятичное число в двоично-десятичное
и из двоичного просто получить
восьмеричное или шестнадцатеричное
(символы 8-го числа от 0 до 7, символы
16-го: 0,1,2,3,4,5,6,7,8,9,A,B,C,D,E,F).
Таблица 4.3
Различные цифровые коды для десятичного числа 23,5
10 |
2/10 |
2 |
8 |
16 |
23,5
510–1 + +3100 + + 2101 |
00100011,0101
(каждому разряду 10-го числа соответствуют 4 разряда 2-го числа) |
10111,1
1·2–1 + +1·20 + +1·21 + +1·22 + +0·23 + +1·24 |
27,4
4· 8–1 + + 7·81 + +2·81
010.111,100 – двоичное число |
17,8
8·16–1 + + 7· 160 + +1· 161
0001.0111,1000 – двоичное число |
За стандарт двоично-десятичного кода принята кодировка 1-2-4-8 (Binary Coded Decimal: BCD), так как она легко читается и контролируется. Возможно предложить еще 17 различных 2/10 кодов.* Двоично-десятичный код используется как переходный при введении оператором десятичной информации в ЭВМ с целью начального запоминания с последующим преобразованием в двоичный.
Восьмеричный код используется для распечатки адреса в системе команд DEC, шестнадцатеричный код – для распечатки адреса в системе команд INTEL.
Существуют еще разновидности цифровых кодов: унитарный, позиционный, код Грея.
Унитарный код – последовательность импульсов, несущая двойную информацию: частота импульсов, количество импульсов.
Позиционный код – это один из N информационных дискретных сигналов. Поэтому его нередко называют дискретным кодом (дискретная информация).
Код Грея – код датчика положения, в котором между двумя соседними значениями кода имеется разница только в одном разряде. Для 4-разрядного числа двоичный код и код Грея представлены в табл. 4.4.
Таблица 4.4
Код Грея в датчиках положения
Десятичное число |
Двоичное число |
Код Грея |
Десятичное число |
Двоичное число |
Код Грея |
0 |
0000 |
0000 |
8 |
1000 |
1100 |
1 |
0001 |
0001 |
9 |
1001 |
1101 |
2 |
0010 |
0011 |
10 |
1010 |
1111 |
3 |
0011 |
0010 |
11 |
1011 |
1110 |
4 |
0100 |
0110 |
12 |
1100 |
1010 |
5 |
0101 |
0111 |
13 |
1101 |
1011 |
6 |
0110 |
0101 |
14 |
1110 |
1001 |
7 |
0111 |
0100 |
15 |
1111 |
1000 |
Код Грея построен на основе диаграммы Карнауга, приведенной на рис. 4.2. Срелка показывает последовательность изменений одного из разрядов.
На рис. 4.3. изображены 4-разрядные датчики положения, которые работают по обычному коду и по коду Грея. Можно увидеть, что в датчике 1-го типа в одном из положений происходит изменение сразу по четырем разрядам (0000→1111). Это не позволяет получить простые достоверные датчики положения.
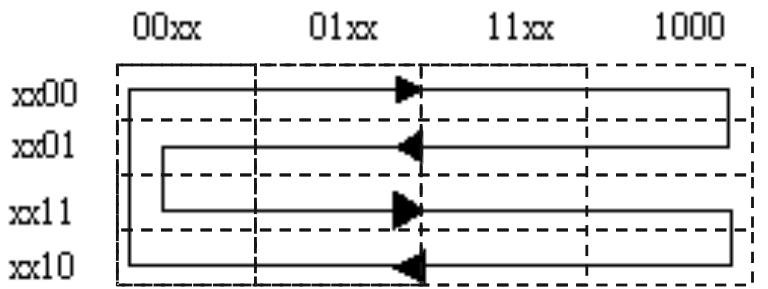
Рис. 4.2. Диаграмма Карнауга
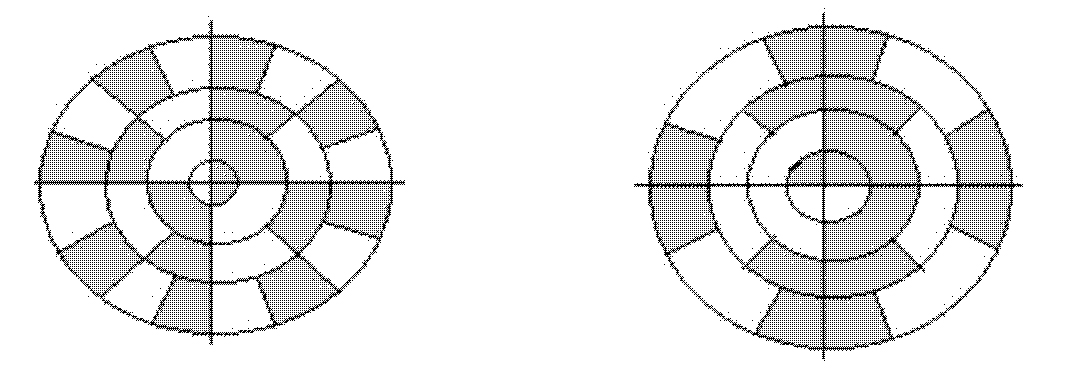
Рис. 4.3. Оптические диски датчиков положения по двоичному коду и коду Грея
Перевод кода Грея в обычный двоичный код осуществляется по следующим правилам: первая единица со стороны старших разрядов остается без изменения, последующие цифры остаются без изменения, если число единиц, им предшествовавших старших разрядов четно, и инвертируются, если число единиц нечетно.