

3.5. Уровни управления в системах автоматизации
I. Технологический – управление отдельными машинами, станками, роботами, транспортом, др. локальными объектами:
а) поведение этих агрегатов задается извне программами или оператором;
б) характерно взаимодействие со средой, т.е. необходимость адаптации к изменениям нагрузки и параметров, неоднородность материала, износ и т.д.;
в) критерии функционирования технологические:
– точность обработки, точность поддержания технологических параметров и режимов;
– интегральные критерии качества продукции.
II. Уровень участка:
вход – плановое задание,
выход – распределение работы между агрегатами 1-го уровня.
III. Цеховой:
основное – подготовка производства (проектирование изделий и процессов, технической оснастки, УП для локальных объектов).
Здесь главное – экономические критерии качества управления.
IV. Заводской:
связи с поставщиками, конъюнктура рынка, прогноз номенклатуры изделий и спроса.
Главное – тоже экономические критерии качества управления.
V. Уровень корпорации.
VI. Уровень страны.
3.6. Тенденции в построении производственных систем
1. Более рациональная организация рабочей среды.
2. Адаптация ТП к рабочей среде – применение более совершенных АСУТП.
1-е направление – автоматизация получения знаний о технологии, т.е. прогнозирование, исследование, проектирование, подготовка производства, испытание продукта. Благодаря этому:
а) уменьшается трудоемкость;
б) сокращается время подготовки производства;
в) выше гибкость, живучесть.
Это системы САD (Computer Aided Design) (по отечественной терминологии САПР).
2-е направление – автоматизация самой технологии: системы САМ (Computer Aided Manufacturing) (АСУТП).
Объединение обоих направлений дает системы САD/САМ (САПР/АСУТП), когда широко используется вычислительная техника для решения вычислительных задач в машинном масштабе времени и для решения задач управления в реальном масштабе времени. Это прежде всего такие задачи:
1) техническое проектирование:
– графическое представление информации;
– машинный анализ;
– создание управляющих программ для изготовления;
– создание, отображение, анализ, запоминание, манипуляция всевозможной графической информацией;
2) перестраиваемость под конкретного пользователя благодаря модульному принципу построения;
3) многотерминальный доступ;
4) одновременное управление системами ЧПУ;
5) возможность расширения (надстройки).
В данном пособии рассматривается только 1-й – технологический – уровень управления. Именно здесь происходит измерение, обработка информации с датчиков, многократное преобразование информации, локальное управление отдельными подсистемами.
Потоки информации для верхних уровней уже упорядочены в пакеты и передаются по стандартным сетям по мере запроса.
Потоки информации для 1-го уровня с верхних уровней нередко носят характер уставок, заданий, коррекций. Если хорошо освоен 1-й уровень управления (технологические процессы, аппаратная база систем управления, алгоритмы управления), то только после этого можно переходить к следующему уровню.
Для начала рассмотрим, как и в какой форме потоки информации передаются в СЧПУ (рис. 3.4). Первоначально информация представлена в буквенных и десятичных кодах чертежа. Данная информация вводится оператором в память СЧПУ через клавиатуру какого-либо устройства программирования по определенным правилам специализированного языка ввода программ (ISO-7bit, Ярус 2, АРТ, Микрон и др.) для задания режимов работы программируемого устройства.
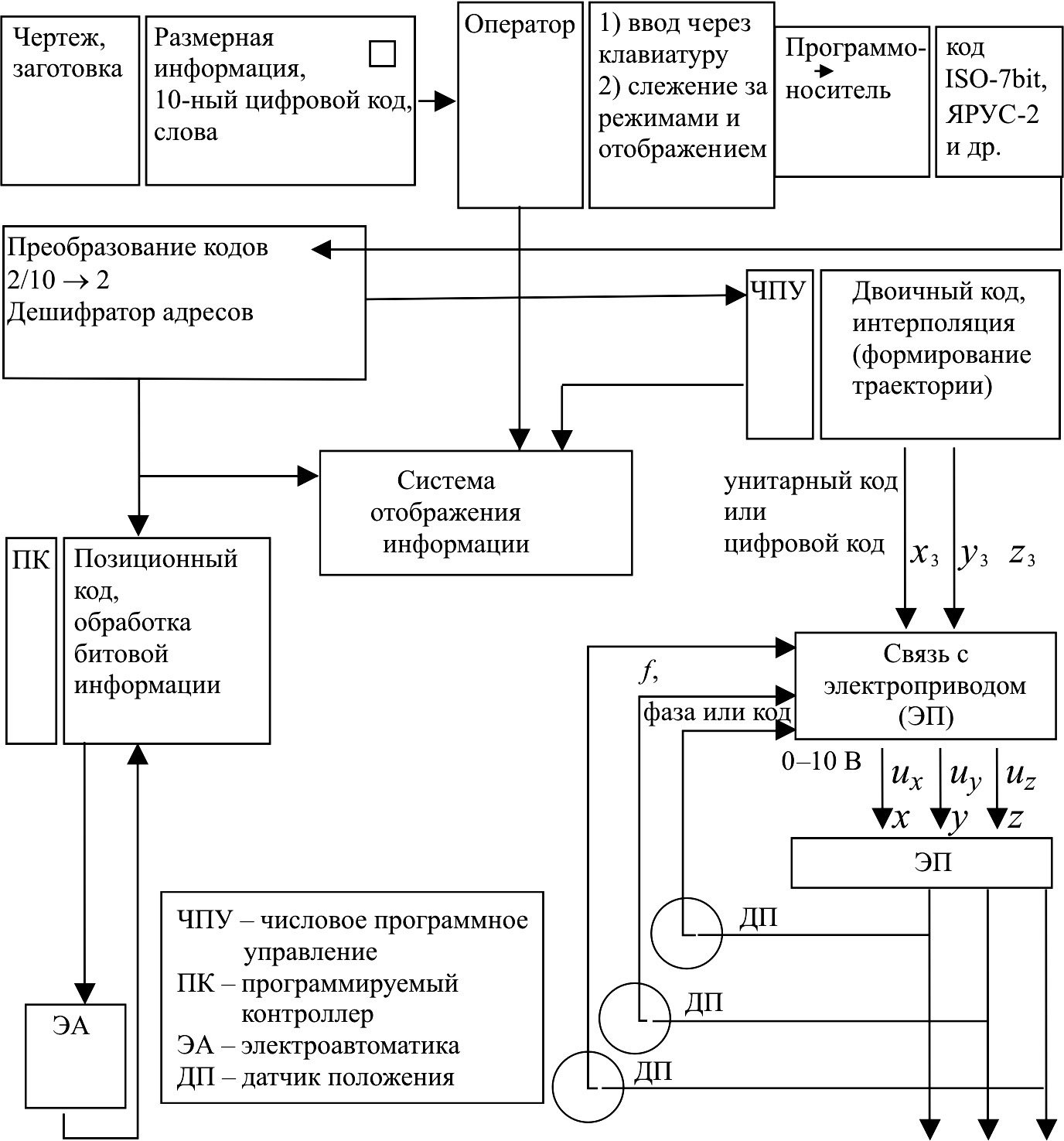
Рис. 3.4. Информация в СЧПУ
Далее информация преобразуется (транслируется) в машинную форму, понятную СЧПУ (двоичные, дискретные, позиционные коды), для последующей обработки программы по определенным заранее алгоритмам. Выходной код СЧПУ для управления электроприводами – аналоговый код задания скорости следует на замкнутую САР скорости. С датчиков положения ДП информация поступает в СЧПУ для организации цифрового или фазоимпульсного регулятора положения.
Дискретные выходы программируемого контроллера ПК следуют на электроавтоматику. С последней сигналы обратной связи об отработке заданий и состоянии дискретных элементов поступают в ПК.
Ход ввода, отработки программы, индикация перемещений, состояние электроавтоматики и другая информация отображаются на дисплее для оператора.
Таким образом, наблюдаем многократное преобразование информации.