

4.3.1 Регулирование скорости вращения ад изменением действующего значения напряжения, подводимого к статору
Этот способ регулирования реализуется с помощью так называемых импульсных регуляторов напряжения, которыеt включатся в цепь обмотки статора.
Принцип действия ИРН основан на том,
что при изменение
-
скважности управляемых импульсов
изменяется среднее и действующее
значение
![]() .
.
![]()
Кроме того регуляторы напряжения могут работать следующим образом. Входные напряжения имеют форму синусоиды . Выходное напряжение по амплитуде не отличается от входного, однако после преобразования имеет форму показанную на рисунке:
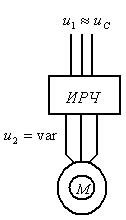
Рис. 111 Схема регулирования скорости изменением напряжения
Соответственно уменьшается среднее значение выходного напряжения и как следствие, действующее значение выходного напряжения.
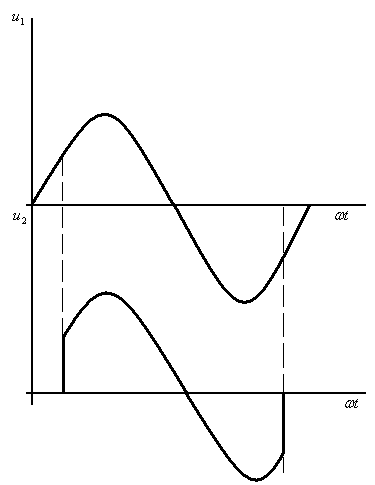
Рис. 112 Временная диаграмма регулятора напряжения
Семейство регулируемых механических характеристик будет иметь следующий вид:

Рис. 113 Регулировочные характеристики при регулировании скорости АД изменением напряжения.
Показатели качества:
1. Однозонное «вниз»
2. Плавность высокая
3. Регулирование при постоянной мощности
4. Энергетические показатели: низкий коэффициент мощности
5. Стабильность: жесткость регулировочных характеристик при уменьшении напряжения падает и как следствие - стабильность низкая.
6. Учитывая неудовлетворительный
показатель «стабильность», а также
резкое уменьшение перегрузочной
способности в области малых скоростей
-![]() .
.
Поэтому сказанное этот способ регулирования используется только в приводах малой мощности.
4.3.2 Регулирование скорости вращения ад изменением числа пар полюсов двигателя
При
,
изменяется угловая скорость вращающегося
магнитного поля
![]() и соответственно угловая скорость
вращения ротора
.
Этот способ реализуется воздействием
на статорную обмотку АД посредством
изменения соединения этой обмотки. С
этой целью серийно выпускаются 2-х, 3-х
и 4-х скоростные АД (многоскоростные), у
которых конструктивно каждая фаза
состоит из 2-х (одной) одинаковых половин,
каждая из которых в свою очередь включает
2 полуобмотки, которые можно переключить
с последовательного согласного соединения
на параллельное. При этом 2-х скоростные
состоят из одной переключающейся
обмотки, 3-х скоростные, из 1й одно
- переключающейся и одной не переключающейся.,
4-х скоростные из 2-х переключающихся .
принцип изменения с помощью такого
переключения числа пар полюсов можно
представить, изобразив одну половину
фазы статорной обмотки в виде 2-х одиночных
полуобмоток.
и соответственно угловая скорость
вращения ротора
.
Этот способ реализуется воздействием
на статорную обмотку АД посредством
изменения соединения этой обмотки. С
этой целью серийно выпускаются 2-х, 3-х
и 4-х скоростные АД (многоскоростные), у
которых конструктивно каждая фаза
состоит из 2-х (одной) одинаковых половин,
каждая из которых в свою очередь включает
2 полуобмотки, которые можно переключить
с последовательного согласного соединения
на параллельное. При этом 2-х скоростные
состоят из одной переключающейся
обмотки, 3-х скоростные, из 1й одно
- переключающейся и одной не переключающейся.,
4-х скоростные из 2-х переключающихся .
принцип изменения с помощью такого
переключения числа пар полюсов можно
представить, изобразив одну половину
фазы статорной обмотки в виде 2-х одиночных
полуобмоток.
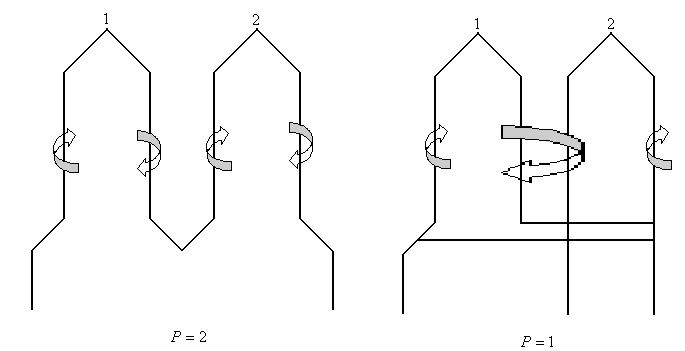
Рис.114 Схема переключения фаз статорной обмотки
Если для определения числа полюсов использовать правило правоходового винта, то напрвление магнитных полюсов будет иметь вид представленный на рис 114.. Такое перключение реализуется 2-мя способами:
1 способ: со звезды на 2-ую звезду
2 способ с труегольника на 2-ую звезду
1-ый способ переключения применяется в том случае если рабочая схема соединения статорной обмотки звезда2-й если теугольник. Поэтому можно сделать вывод, что этот способ применим только для АД с к.з. ротором.

Рис.115 переключение со Y и Δ на YY
При этом номинальный ряд скоростей для многоскоростных АД будет:
3000, 1500, 1000, 500
![]()
3000, 1500, 750, 375
Для того чтобы представить себе как будет выглядеть механические характеристики при переключении со звезды на 2-ую звезду и при переключении с треугольника на 2-ую звезду, определим значения моментов.
а. при соединении в звезду
б. при соединении в 2-ую звезду
в. при соединении в треугольник
В общем случае момент можно определить:
![]()
Если пренебречь потерями мощности в
двигателе, то
![]() можно принять потребляемой электрической
мощности
можно принять потребляемой электрической
мощности
![]() ,
который можно выражать через:
,
который можно выражать через:
![]()
Будем считать, что
![]() ,
при любом способе соединений фаз
статорной обмотки практически не
изменится. Тогда:
,
при любом способе соединений фаз
статорной обмотки практически не
изменится. Тогда:
![]()
Т.к. число пар полюсов
![]() уменьшается
в 2 раза (
уменьшается
в 2 раза (![]() ),
то
в
2 раза увеличивается (
),
то
в
2 раза увеличивается (![]() ).
).
![]()
![]()
![]()
![]()
При переключении со звезды на 2-ую звезду электромагнитный момент двигателя не меняется.
![]()
При переключении с треугольника на 2-ую
звезду электромагнитная мощность
изменяется в
![]() раз.
раз.
![]()
![]()
При переключении с треугольника на 2-ую
звезду электромагнитный момент измениться
в
![]() раз
раз
![]()
Семейство механических характеристик будет иметь следующий вид:

а) б)
Рис.116 Семейство механических характеристик
Показатели качества регулирования, при переключении со звезды на 2-ую звезду и с треугольника на 2-ую звезду:
1. направление: однозонное вверх
2. плавность регулирования ступенчатое:
3. стабильность высокая, жесткость не меняется.
4. энергетическая эффективность: при регулировании ни КПД ни не меняется.
5. Допустимая нагрузка на валу двигателя. При переключении со звезды на 2-ую звезду при , а при переключении с треугольника на 2-ую звезду при .
6 .
.
![]() 4-х скоростные двигатели
4-х скоростные двигатели
![]()
Т.о. все показатели качества регулирования изменением числа пар полюсов очень высокие, за исключением показателя – «плавности». Однако для некоторых типов ЭД в переходных режимах этот показатель можно улучшить. В частности на многих промышленных предприятиях Татнефть широко применяется электропривод станков, - качалок, в которых используются 2-х скоростные АД.
В начале эксплуатации скважины при высоком динамическом уровне жидкости целесообразно использовать двигатели при малом числе оборотов. По истечению определённого срока службы скважины, когда её производительность падает двигатель переводят в режим работы с большим числом оборотов.
При этом переход с меньшей скоростью на большую, производится с циклическим чередованием 2-х скоростей. Промежуток времени циклического чередования с одной скорости на другую равен 10 минутам.
![]()
При этом динамический процесс проходит плавно.