16. Интерфейс ieee-488.
Специализированный параллельный интерфейс, предназначенный для организации автоматизированных измерительных систем.
Данный интерфейс определяет универсальную систему физического и электрического соединения КИП отечественного и зарубежного производства.В России данный интерфейс имеет название «Канал общего пользования» (КОП) и определен стандартом ГОСТ 26.003-80. GPIB (интерфейсная шина общего назначения). Стандарт GPIB определяет три различных типа устройств, которые
могут быть подключены к шине: "слушатель", "говорящий" и/или контрол-лер. Устройство в состоянии "слушатель" считывает сообщения с шины; устройство в состоянии "говорящий" посылает сообщения на шину. В каждый конкретный момент времени в состоянии "говорящий" может быть одно и только одно устройство, в то время как в состоянии "слушатель" может быть произвольное количество устройств. Контроллер выполняет функции
арбитра и определяет, какие из устройств в данный момент находятся в состоянии "говорящий" и "слушатель".
Достоинства: простота подключения; простота физического уровня обмена информацией.
Недостатки: сложный уровень логического обмена.
Шина КОП состоит из 24 проводов. Сигнальные линии шины (16 линий) относятся к одному из трех классов:
• шина данных,
• шина синхронизации,
• шина управления интерфейсом.
Ш ина
синхронизации – это шина с открытым
коллектором (ОК)
ина
синхронизации – это шина с открытым
коллектором (ОК)
Шина данных – шина с тремя состояниями, следовательно, число линий уменьшается, а значит, упрощается подключение.
Применение ОК позволяет упростить логику обмена и строить семы с монтажным И:
Временная диаграмма обмена:
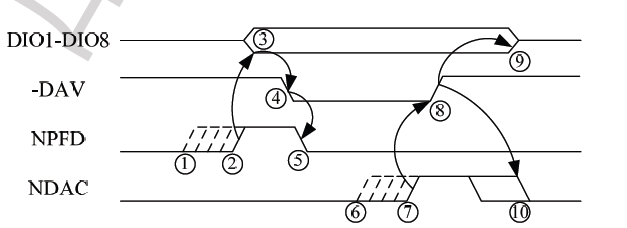
• 1-2 - Не все готовы
• 2- все слушатели готовы к приему данных
• 3- говорящий на шину Д выставляет данные
• 4 – через некоторую задержку переводит строб Д в активное состояние. Задержка нужна для завершения всех переходных процессов и чтобы все уровни были зафикстрованы.
• 5 – слушатели получив строб Д сбрасывают сигнал готовности и начинают прием Д
• 6 – слушатель который принял, выставляет свой сигнал «Д приняты»
• 6-7 – не все приняли
• 7 – когда все приняли, сигнал находится в состоянии 1.
• 8 – готовый снимает сигнал «Строб Д», а затем переводит в 3-е состояние (состояние 9)
• 10 – слушатели по снятию сигнала «Строб Д» снимают свои сигналы «Д приняли».
Устройство типа "говорящий" помещает новые данные на шину только тогда, когда все устройства типа "слушатель" готовы к приему. Тем самым, процедура синхронизации гарантирует, что скорость передачи данных по шине не превышает скорость их обработки самым медленным из
клиентов. Данное обстоятельство требуется учитывать при использовании GPIB для соединения устройств, работающих с разной скоростью.
Поиск источника запроса на обслуживание
Сигнал SRQ является общим для всех КИП, подключенных к шине КОП, за исключением контроллера.
При этом для контроллера после получения сигнала SRQ возникает вопрос об идентификации КИП, требующего обслуживания (выставившего сигнал SRQ на шину КОП). При этом существуют два алгоритма определения источника запроса:
• последовательный опрос;
• параллельный опрос.
При последовательном опросе контроллер последовательно опрашивает все устройства, способные сформировать сигнал SRQ до момента определения устройства, сгенерировавшего сигнал SRQ. Этот метод универсален, но не отличается быстродействием.
При параллельном опросе контроллер выставляет в канал шины КОП специальную команду, а в ответ все устройства выставляют на шину данных бит состояния. Контроллер, считывая состояние шины данных КОП, определяет устройство, сгенерировавшее сигнал SRQ. Каждое из устройств формирует свой уникальный бит состояния.
Такой метод позволяет опросить ограниченное число (не более 8) КИП.
Команды интерфейса IEEE-488
Стандарт шины КОП определяет, что данные, принимаемые КИП, подключенными к шине КОП при низком уровень сигнала на линии ATN (управление), вырабатываемый контроллером, идентифицируются не как данные, а как команды, должны приниматься и обрабатываться всеми подключенными КИП.
Стандарт шины КОП различает:
• «одношинные» команды, которые передаются от контроллера ко всем приборам по одной отдельной шине. К таким командам относятся появление сигнала низкого уровня на линии REN (дистанционное управление) или IFC (очистка интерфейса);
• «мультишинные» команды, которые передаются от контроллера ко всем КИП в виде специального информационного сообщения при низком уровне сигнала налинии ATN (управление.)
«Мультишинные» команды классифицируются на следующие группы:
• группа универсальные команд, принимаемые и обрабатываемые всеми подключенными КИП безотносительно от установленного адреса;
• группа адресных команд, воспринимаемые и обрабатываемые отдельными КИП при совпадении адреса, передаваемого контроллером, и адреса, установленного на отдельном КИП.
Алгоритмы обмена данными по шине
На шине каждого КОП выставляется свой уникальный адрес. Задание этого адреса либо программно либо аппаратно (задняя панель).
Алгоритм передачи сообщения от контроллера к КИП:
1. контроллер устанавливает на линиях REN и ATN низкий уровень (информирует КИП о начале передачи команд управления);
2. контроллер по шине данных передает следующую последовательность команд:
• ULN (значение 3Fh) – «не принимай»;
• UNT (значение 5Fh) – «не передавай»;
• LSN (значение 20h+<addr>) - назначение КИП с адресом <addr> «слушателем» (кто должен принимать данные).
3. контроллер переводит линию ATN в высокий уровень (информирует КИП о начале передачи данных);
4. контроллер по ШД передает массив данных в виде сообщения заданного формата;
5. в последнем цикле обмена по шине данных контроллер устанавливает линию EOI в низкий уровень (информирует КИП о завершении передачи данных);
6. контроллер устанавливает линию EOI в высокий уровень, а линию ATN – в низкий уровень (информирует КИП о передаче команд);
7. контроллер по шине данных передает команду UNT (значение 5Fh) – «не передавай»;
8. контроллер устанавливает линию ATN и REN в высокий уровень.
Техническая реализация интерфейса IEEE-488
Схемное решение 1. Данное решение основано на применении специальных БИС, разработанных для данного интерфейса. Весь функционал интерфейса реализован на программируемой БИС i8291А (580ВК91А).
Схемное решение 2. В данном решении применяется БИС программируемого параллельного интерфейса i8055 (580ВВ55). Вся логика обмена и синхронизации переносится на программный уровень ЦП ВУ.
Схемное решение 3. Данное решение основано на применении PIC-контроллеров с приемопередатчиками, удовлетворяющими требованиям шины КОП. Функции интерфейса реализуются на программном уровне PIC-контролера.
Схемное решение 4. Данное решение основано на применении программируемых логических интегральных схем (ПЛИС).
Достоинства: возможность внесений необходимых изменений в аппаратуру потребителем.
Билет 17. Модули УСО
Неотъемлемой частью любой АСУТП являются устройства связи с объектом (УСО), назначение которых заключается в сопряжении датчиков аппаратуры и исполнительных механизмов контролируемого объекта и/или технологического процесса с вычислительными средствами системы [1]. На рисунке 8.1 представлена схема контура управления и контроля на базе
модулей УСО.
 Рисунок
8.1
- Схема контура управления
и
контроля
на
базе модулей
УСО
Рисунок
8.1
- Схема контура управления
и
контроля
на
базе модулей
УСО
много варьируемых параметров для создаваемых УСО:
• число входных и выходных сигналов;
• кодирование и дешифрация цифровых сигналов;
• одноканальность или многоканальность преобразователей ана-
логовых сигналов;
• конструктивно-технологические особенности.
Трудности унификации УСО связаны также с временными характеристиками объектов. Схемотехника УСО изменяется в зависимости от того, с какой периодичностью требуется опрашивать или выдавать управляющие сигналы, требуется или нет быстрая реакция на изменения значений сигналов, какой способ выбран для борьбы с дребезгом контактов.
Классификация
всего
парка
УСО
осуществляется
по
признакам,
ко торые
приведены
на
рисунке
8.2
торые
приведены
на
рисунке
8.2
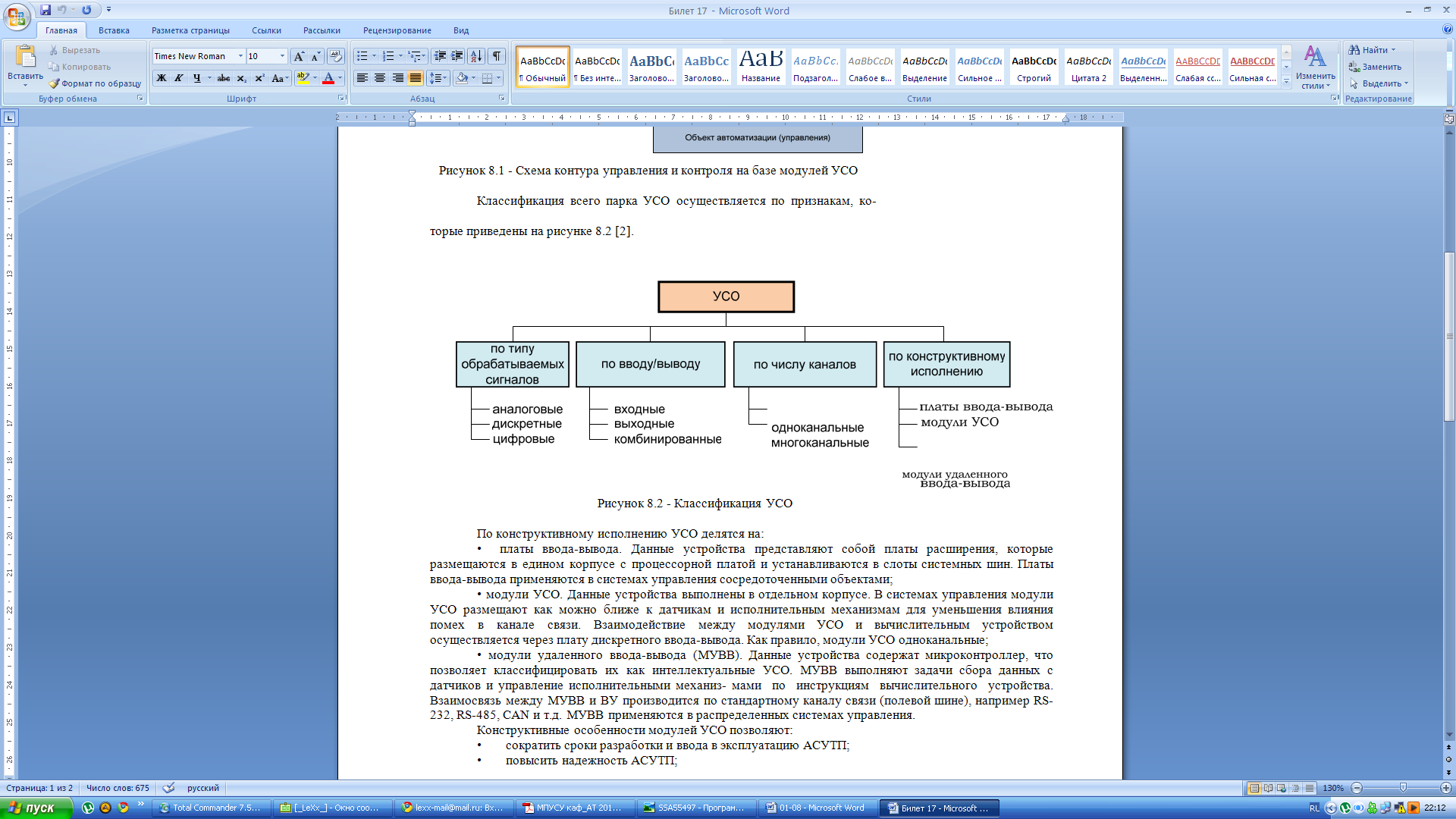
Рисунок 8.2 - Классификация УСО
По конструктивному исполнению УСО делятся на:
• платы ввода-вывода. Данные устройства представляют собой платы расширения, которые размещаются в едином корпусе с процессорной платой и устанавливаются в слоты системных шин. Платы ввода-вывода применяются в системах управления сосредоточенными объектами;
• модули УСО. Данные устройства выполнены в отдельном корпусе. В системах управления модули УСО размещают как можно ближе к датчикам и исполнительным механизмам для уменьшения влияния помех в канале связи. Взаимодействие между модулями УСО и вычислительным устройством осуществляется через плату дискретного ввода-вывода. Как правило, модули УСО одноканальные;
• модули удаленного ввода-вывода (МУВВ). Данные устройства содержат микроконтроллер, что позволяет классифицировать их как интеллектуальные УСО. МУВВ выполняют задачи сбора данных с датчиков и управление исполнительными механиз- мами по инструкциям вычислительного устройства. Взаимосвязь
между МУВВ и ВУ производится по стандартному каналу связи (полевой шине), например RS-232, RS-485, CAN и т.д. МУВВ применяются в распределенных системах управления.
Конструктивные особенности модулей УСО позволяют:
• сократить сроки разработки и ввода в эксплуатацию АСУТП;
• повысить надежность АСУТП;
• быстро производить диагностику и замену вышедших из строя модулей;
• упростить обслуживание действующих АСУТП.
Общие требования, предъявляемые к модулям УСО [3]:
• высокая точность (точность средств сбора и передачи данных);
• высокое быстродействие (получение информации, скорость передачи по каналам связи, время построения закона управления);
• высокая надёжность (всех узлов УСО);
• низкая стоимость;
• модули УСО должно выполнять как можно больше функций для разгрузки ВУ, если это не требует больших затрат.
Бывают дискретные и аналоговые.
Модули удаленного ввода-вывода
Применение распределенных систем управления и сбора данных позволяет:
• значительно сократить затраты на кабельные коммуникации, идущие к датчикам;
• приблизить мощность современных вычислительных средств к объекту управления;
• повысить живучесть всей системы, легко заменять отказавшие элементы, дублировать критически важные узлы;
• использовать принцип модульности, делая отдельные элементы и узлы системы относительно независимыми и автономными;
• вводить в строй не всю систему сразу, а поэтапно;
• снизить расходы на модернизацию системы, быстрое расширение и наращивание возможностей;
• быстро интегрировать вновь создаваемые системы в общую информационную сеть предприятия.
связь между МУВВ и ВУ производится по стандартному каналу связи (полевой шине), например RS-232, RS-485, CAN и т.д. МУВВ применяются в распределенных системах управления.
Распределенная подсистема ввода-вывода (РПВВ), которая является составной частью распределенной системы управления и сбора данных, реализуется на базе двух типов устройств:
• модули удаленного ввода-вывода (МУВВ);
• системы сбора данных и управления (ССДУ).
МУВВ могут объединяться в сети на основе интерфейса RS-485 и Ethernet.
Для мобильных распределенных подсистем ввода-вывода применяют
МУВВ с интерфейсом USB. К преимуществам данных МУВВ относятся:
• USB является стандартным интерфейсом ПРК;
• компактность, легкость в сборке;
• простота настройки, подключение plug-and-play;
• соединение с 127 модулями через единственное ведущее USB-устройство;
• пропускная способность при передаче данных составляет 480Мб/с;
• наличие встроенных средств преобразования сигналов;
• отсутствие необходимости в дополнительных источниках питания, что чрезвычайно важно для мобильных систем. Питаниеосуществляется через штатный кабель USB.
МУВВ обеспечивают выполнение следующих основных функций:
• прием и дешифрацию команд по каналу RS-485;
• ввод и нормализацию аналоговых сигналов (ток, напряжение);
• опрос состояния дискретных входов;
• фильтрацию аналоговых и дискретных входных сигналов;
• вывод аналоговых (ток, напряжение) и дискретных сигналов;
• аналого-цифровое преобразование АЦП (для модулей аналогового ввода);
• цифро-аналоговое преобразование ЦАП (для модуля аналогового вывода);
• преобразование шкалы значений непрерывных параметров в предварительно заданные единицы измерения;
• формирование и передачу в адрес основной вычислительной системы информации, содержащей результат измерения или состояние дискретных входов, после получения соответствующего запроса по каналу RS-485.
Модули аналогового ввода - вывода имеют гальваническую изоляцию между цепями, реализующими функции нормализации, низкочастотной фильтрации АЦП/ЦАП, и встроенным микропроцессором.
Настройка и калибровка МУВВ осуществляется программным спосо- бом путем передачи в их адрес соответствующих команд по информацион- ной сети на основе интерфейса RS-485.
Билет 18. Построение плат дискретного ввода-вывода
 Обобщенная
схема
ПДВВ приведена
на
рисунке
10.2.
Обобщенная
схема
ПДВВ приведена
на
рисунке
10.2.
Рисунок 10.2 – Обобщенная схема платы дискретного ввода-вывода
ПДВВ состоит из:
• контроллера шины с буфером данных;
• блока потенциального ввода-вывода;
• блока таймера/счетчика;
• преобразователя ШИМ;
• схем сопряжения;
• блока защиты.
Контроллер шины с буфером данных представляет собой интерфейсную часть ПДВВ и предназначен для организации обмена данными между процессором и программно-доступными элементами ПДВВ. Обмен данными осуществляется по системной шине в соответствии с временными диаграммами циклов шины для соответствующих режимов обмена.
Блок потенциального ввода-вывода предназначен для приема и передачи дискретных сигналов в виде уровней напряжений и токов. В качестве программно-доступных портов ввода используются буферы с тремя состояниями без памяти. В отдельных случаях применяют буферы с памятью (регистры). В качестве программно-доступных портов вывода используют триггерные элементы и регистры.
Блок таймера/счетчика предназначен для подсчета количества переключений (смены состояний) внешнего устройства или измерения частоты импульсов. Счетчик содержит программно-доступный регистр результата счета. Процедура и периодичность чтение данного регистра задается прикладной программой. Таймер содержит генератор импульсов для канала дискретного вывода. В состав таймера входят программно-доступные регистры задания режима работы генератора и частоты импульсов. Наличие данных регистров обеспечивает гибкое управление генератором со стороны прикладной программы.
Преобразователь ШИМ обеспечивает прием и передачу данных с ис- пользованием широтно-импульсной модуляцией. Преобразователь ШИМ со- держит набор программно-доступных регистров задающих режим работы, период ШИМ и осуществляющих прием и передачу данных.
Схемы сопряжения предназначены для обеспечения электрической совместимости уровней различных устройств. Программно-доступные элементы ПДВВ имеют ТТЛ-уровни. Таким образом, схемы сопряжения преобразуют ТТЛ-уровни в уровни внешних выходных устройств в соответствии с заданной характеристикой канала вывода и на оборот, уровни внешних входных устройств с заданной характеристикой канала ввода в ТТЛ- уровни. Кроме того, схемы сопряжения реализуют гальваническую изоляцию (изоляционный барьер) между основными внутренними устройствами платы и внешними устройствами.
Блок защиты предназначен для защиты входных и выходных цепей ПДВВ от коротких замыканий и перегрузок, ошибок полярности сигнала. Для защиты от коротких замыканий и перегрузок применяют самовосстанавливающие предохранители типа PolySwitch. Для защиты от ошибок полярности сигнала используют стандартные выпрямительные диоды. Штатный блок зашиты приведен на рисунке 10.3.

![]()
![]()
![]()
Для организации режима прерывания в схему необходимо добавить триггер формирования запроса прерывания. В качестве условий прерываний выступают следующие события:
• срабатывание аварийных датчиков;
• смена состояния датчиков;
• наступление временного события (срабатывание таймера ввода-вывода и другое.
 +5В
+5В
dd1
dd2
dd8
Детектор смены состояния
 Детектор
смены
состояния
Детектор
смены
состояния
. . .
Детектор смены состояния
1 S T D
C R
от селектора адреса
Запрос прерывания
Линия задержки
1 1
 А
=1
А
=1
10нс
Вход


 А
Выход
А
Выход
В тех случаях, когда количество потенциальных каналов ввода- вывода больше 16 рекомендуется применять БИС программируемого параллельного интерфейса i8055 или его аналоги.
Схема счетного входа ПДВВ приведена на рисунке 10.7. Основу схемы составляет n-разрядный счетчик СТ, который выполняет подсчет им- пульсов, с асинхронным сбросом R и входом разрешения счета CE. Счет запрещен при обращении процессора к ПДВВ (активный уровень сигнала –EN). По окончанию данного обращения формируется сигнал сброса СТ.
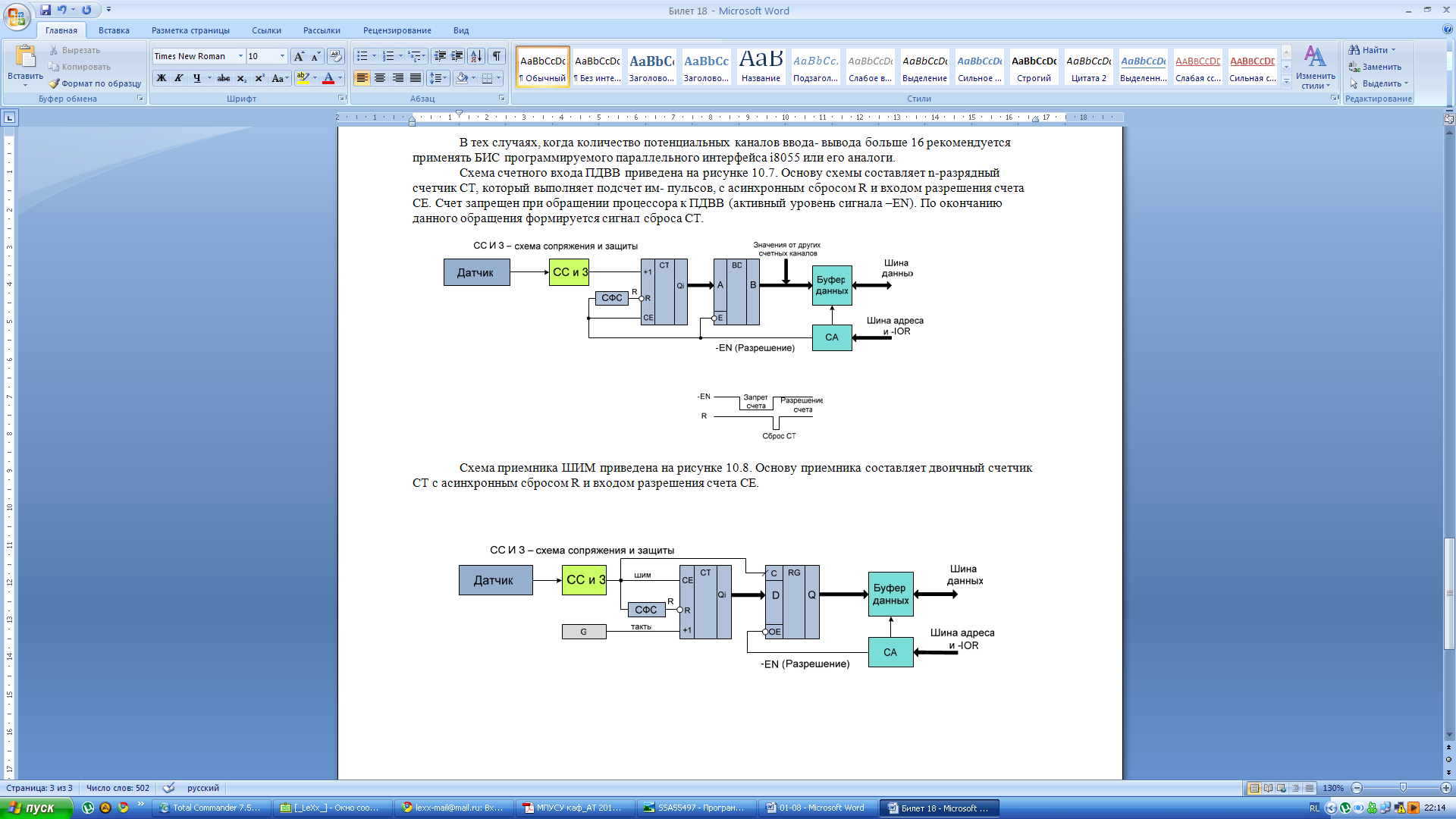
Схема приемника ШИМ приведена на рисунке 10.8. Основу приемника составляет двоичный счетчик СТ с асинхронным сбросом R и входом разрешения счета СЕ.
Билет 19. Системы многоканального ввода-вывода аналоговых сигналов
На рисунке 11.2а показана система управления процессом сбора/распределения данных, в котором каждому каналу соответствует от- дельный ЦАП и АЦП. Альтернативная конфигурация показана на рисунке
11.2б, в данной системе используется один ЦАП и один АЦП совместно с аналоговыми мультиплексорами и демультиплексорами. В большинстве случаев, особенно при большом числе каналов, вторая конфигурация является более экономичной.
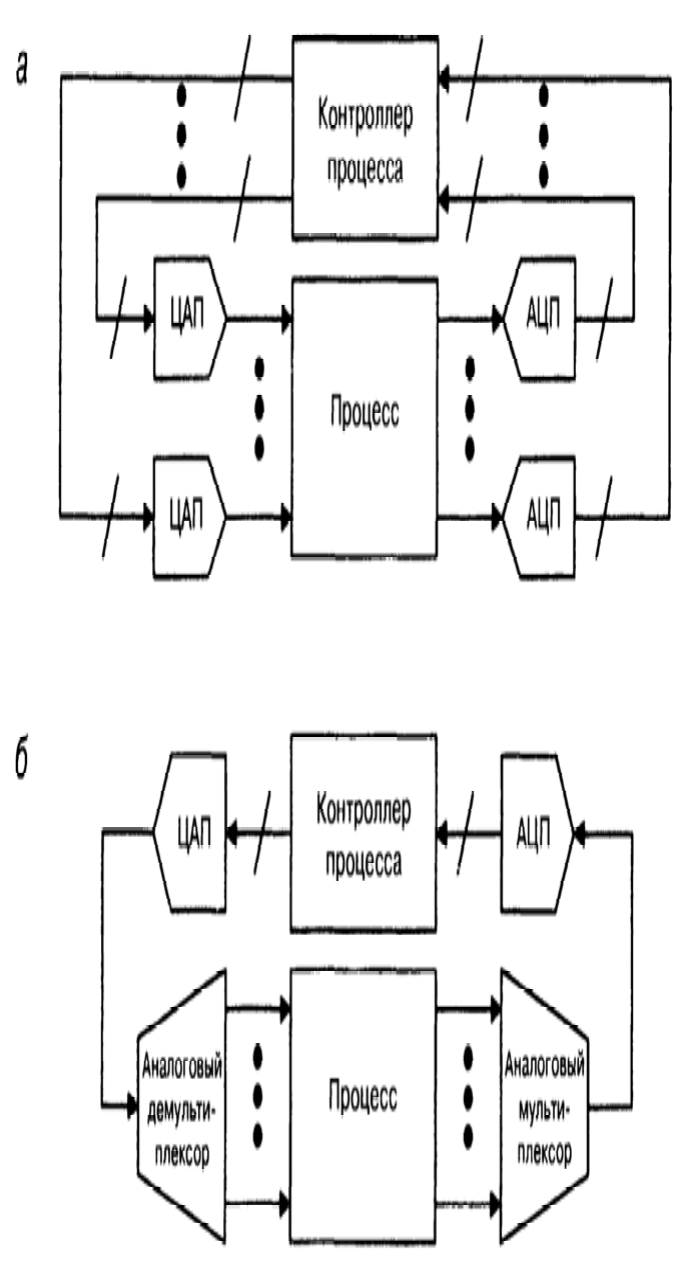
При проектировании системы сбора данных следует обеспечить выбор оптимальной комбинации многих параметров. Необходимо решить такие задачи, как фильтрация, усиление, мультиплексирование, демультиплексирование, выбор частоты дискретизации и разбиение системы на функциональные модули.
Параллельная ССД позволяет обеспечить:
1) максимальную независимость аппаратуры всех каналов ССД (из-за независимости обработки каждого сигнала);
2) высокое качество преобразования сигналов (вследствие возможности системы по обеспечению требуемого уровня нормализации сигнала на входе АЦП в каждом канале);
3) устранение ошибок, возникающих при коммутации и выборке- хранении аналоговых сигналов, вносящих основной вклад в суммарную погрешность преобразования.
Параллельная ССД имеет большое будущее. Однако при его реализации имеет место более высокая стоимость ССД вследствие сравнительно высокой стоимости АЦП.
По сравнения с АЦП, ЦАП более простые устройства и быстродействие их высоко. Поэтому стоимость и надежность обоих вариантов отличаются не значительно, а по точности преобразования параллельная СРД превосходит последовательную. Как следствие, на практике в основном используют параллельную СРД, кроме того, на рынке доступны БИС, которые в одном кристалле содержат до 40 каналов ЦАП.
Билет 20. АЦП/ЦАП. Основные архитектуры,интерфейсы связи
АЦП и ЦАП выполняют преобразования между аналоговым сигналам и цифровым кодов в соответствующем направлении.
В АЦП и ЦАП существует 4 погрешности в преобразованиях: погреш- ность смещения, погрешность усиления и 2 вида ошибок линейности (дифференциальная и интегральная).
Ошибка интегральной линейности преобразователя обычно определя- ется значением максимального отклонения реальной передаточной харак- теристики преобразователя от прямой линии. Данная ошибка выражается в процентах от полной шкалы (не может даваться в LSB).
Другим типом нелинейности преобразователя является дифференци- альная нелинейность (DNL). Она имеет отношение к линейности кодовых переходов преобразователя.
Дифференциальная нелинейность определяется как максимальная величина отклонения любого кванта (или изменения в LSB) на всей переда- точной функции от его идеального размера в 1 LSB.
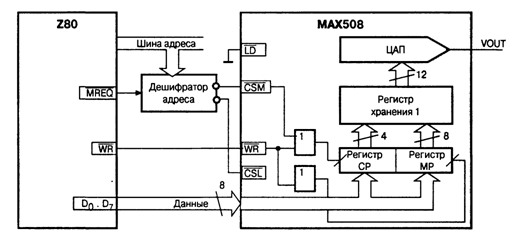
Некоторые ЦАП используют внешнее опорное напряжение (см.рисунок 12.9) и имеют опорный вход, тогда как в других выходной сигнал определяется внутренним опорным напряжением.
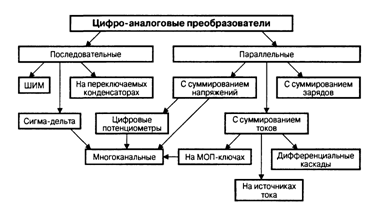
ЦАП предназначен для преобразования числа, представленного, как правило, в виде двоичного кода, в напряжение или ток, пропорциональные этому числу. Схемотехника аналоговых преобразователей весьма разнообразна. На рисунке 12.10 представлена общая классификация ЦАП по способам преобразования входного кода и схемам формирования выходного сигнала.
Дальнейшую классификацию ИМС ЦАП можно привести по ряду специфических признаков, например:
1. По роду выходного сигнала: преобразователи с токовым входом или с выходом по напряжению.
2. По типу цифрового интерфейса: с последовательным вводом или с параллельным вводом.
3. По числу ЦАП на кристалле: одноканальные и многоканальные.
4. По быстродействию: низкого, среднего и высокого быстродействия.
5. По разрядности.
Большинство схем параллельных ЦАП основано на суммировании то- ков, сила каждого из которых пропорциональна весу цифрового двоичного разряда, причем должны суммироваться только токи тех разрядов, значения которых равны 1
ЦАП на источниках тока обладают более высокой точностью. В отличии от предыдущего варианта, в котором весовые токи формируются резисторами сравнительно небольшого сопротивления и как следствие зависят от сопротивления ключей и нагрузки, в данном случае весовые токи обеспечиваются транзисторными источниками тока, имеющими высокое динамическое сопротивление. Упрощенная схема ЦАП на источниках тока приведена на рисунке 12.15.
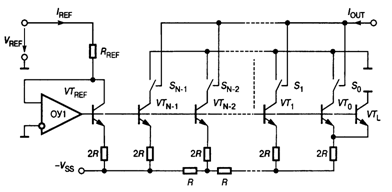
Рисунок 12.15 – Схема ЦАП на источниках
Весовые токи формируются источниками тока с помощью резистивной матрицы. Потенциалы баз транзисторов одинаковы, а чтобы были равными и потенциалы эммитеров всех транзисторов, площади их эммиторов делают различными в соответствии с весовыми коэффициентами.
Важную часть ЦАП составляет цифровой интерфейс, т.е. схемы, обеспечивающие связь управляющих входов ключей с источниками цифровых сигналов. Структура цифрового интерфейса определяет способ под- ключения ЦАП к источнику входного кода, например, микропроцессору или микроконтроллеру. Свойства цифрового интерфейса непосредственно влияют и на форму сигнала на выходе ЦАП. Так, в случае параллельного интерфейса неодновременность поступления битов входного слова на управляющие входы ключей преобразователя приводят к появлению узких выбросов, «иголок», в выходном сигнале при смене кода.
В зависимости от способа на- грузки входного слова в ЦАП различают преобразователи с последователь- ным и параллельным интерфейсами входных данных.
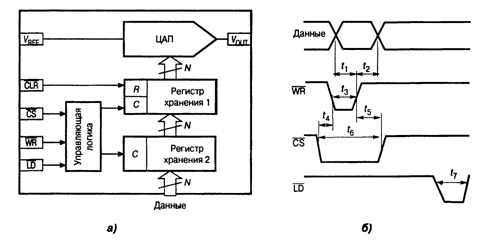
Такой преобразователь помимо собственно ЦАП содержит на кри- сталле дополнительно последовательный регистр загрузки, параллельный регистр хранения (буферный регистр) и управляющую логику (см.рисунок
12.16).
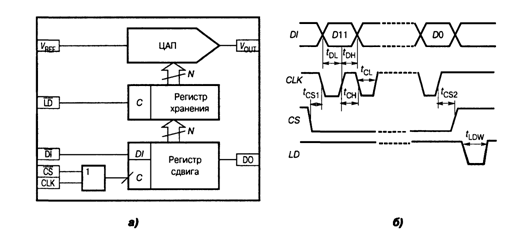
На время загрузки входного слова в ЦАП через последовательный порт МК, к которому могут быть также подключены и другие приемники, на вход CS (выбор кристалла) подается активный уровень с одной из линий ввода-вывода МК. После окончания загрузки МК меняет уровень на входе CS, как это показано на рисунке 12.16б, и, выставив активный уровень на входе LD ЦАП, обеспечивает пересылку входного кода из регистра сдвига ЦАП в регистр хранения. Время загрузки зависит от тактовой частоты МК и обычно составляет единицы микросекунд.
ЦАП с параллельным интерфейсом
Наиболее часто используется два варианта. В первом случае, когда разрядность входного кода совпадает с разрядностью ЦАП, на его входы подается все входное слово целиком (см.рисунок 12.18).
Интерфейс такого ЦАП включает два регистра хранения и систему управления (см.рисунок 11.23а). Два регистра хранения нужны, если пере- сылка входного кода в ЦАП и установка выходного аналогового сигнала, соответствующая этому коду, должны быть разделены во времени.
Для подключения многоразрядных ЦАП к 8-разрядным МП и МК ис- пользуется второй вариант параллельного интерфейса. Он предусматрива- ет наличие двух параллельных загрузочных регистров для приема младшего байта входного слова МБ и старшего байта – СБ (см.рисунок 12.20).
Пересылка байтов входного слова в загрузочные регистры может происходить в любой последовательности.