

58) Электрдинамикалық тежеу
3.6 суретте электродинамикалық тежелудің ТҚ ТТҚ сұлбасы көрсетілген. Қозғалтқыш зәкірі тордан өшірілген және қосымша тежелу кедергісіне RТ тұйықталған, қозу орамы қорек көзіне қосылған. Сонымен қатар, зәкір тогы белгісін керісінше өзгертеді.
![]() .
.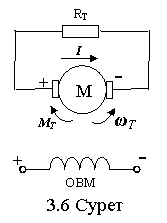
Зәкір тогы қозу ағынымен байланысып, қозғалтқыш зәкірінің айналу жылдамдығына қарсы бағытталған момент тудырады. Электрмеханикалық және механикалық сипаттамалар теңдеуі мына түрде:
![]()
![]() .
.
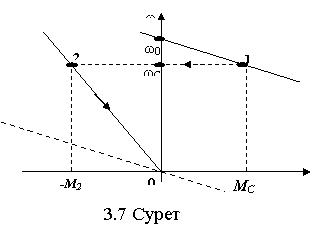
Механикалық сипаттама динамикалық тежелу режімінде координат басы арқылы өтеді (3.7 суретті қара). Жылдамдық төмендеген сайын тежелу моменті азаяды және төмендеген жылдамдық кезінде, оның өлшемін көтеру қажетті жағдайда да қозғалтқыштың зәкірлі шынжырының кедергісін сатылап азайта отыра, оның жылдамдығының азаюымен екі немесе үш сатылы тежелуге келеді.
61) Тұрақты тоқтың реттелетін электр жетектері
Тұрақты токтың реттелетін элекржетектері. ТҚ ТТҚ жылдамдығының реостатты реттелуі. Ф–var кезіндегі ТҚ ТТҚ-ң механикалық сипатттамасы және реттелу сұлбасы 7.2, 7,3 суреттерде көрсетілген.
1. Реттелудің нақтылығы
Реттеудің
абсалютті қатесі төмендегідей:
![]()
реттеудің
салыстырмалы қатесі
![]() .
.
2. Реттеудің жоғарғы аралығы ТТҚ табиғи сипаттамасымен, төменгі аралығы - қосымша кедергідегі шығындармен және механикалық сипаттамаларда болатын қатаңдықтармен шектелген. Реттеу диапазонын D=1.5…2 жоғарылатпау керек.
3. Реттеудің бірқалыптылығы: Сатылы реттеу. Бірқалыптылық - реттелетін кедергінің секция санымен анықталады.
4. Үнемділік:
4.1 ТП-Д-мен салыстырғанда капиталды шығындар мен қолданыс шығындары үлкен емес.
4.2 Реттеу кезіндегі қуатты біршама жоғалуы:
![]() ;
;
![]()
мұндағы
![]() -
тордан қолданылатын қуат;
-
тордан қолданылатын қуат;
![]() -
механикалық қуатқа түрлендірілген
электр магниттік қуат;
-
механикалық қуатқа түрлендірілген
электр магниттік қуат;
![]() -
зәкірлі шынжырдағы қуат шығыны
-
зәкірлі шынжырдағы қуат шығыны
62) Электр қозғалтқышын таңдау
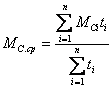
МС(t) және ω(t) тәуелділіктеріндегі механизмнің жүктемелік диаграммалары – қозғалтқышты таңдаудағы бастапқы берілгендер болып табылады. Жүктемелік диаграммалар әрқашан да кез келген түрде бола алады, бірақ та циклды бөлуге болады, яғни диаграмма қайталанатын уақыт аралығы tЦ бірнеше. Егер сипаттама жұмысы осылай болса, яғни режімдер (лифт, көтергіш кран) нашар өндірілсе, аса күрделі циклдар үшін диаграмма тұрғызады. Механизмнің жүктемелік диаграммасы бойынша қозғалтқышты алдын ала таңдауы үшін статикалық жүктеменің орташа моментін тауып алуға болады.
 (14.1)
(14.1)
мұндағы МСi – статикалық жүктеменің i-ші аралықтағы моменті;
ti – i-ші аралықтың жалғасы;
n – бұл МС=const болғанда- ғы аралықтар саны.
Ізделініп отырған қозғалтқыштың номиналды моментін былай табуға болады:
МН = kДМС.ср, (14.2)
мұндағы kД=1.1…1.3 -динамикалық режімді есептейтін коэффициент.
Егер негізгі жылдамдықтан біраумақты төмен ωМАКС реттеу немесе негізгі жылдамдықтан біраумақты жоғары ωМИН реттеу болса, номиналды жылдамдық ретінде алуға болады.
Осылай табылған МН және ωН мәндеріне қозғалтқышты тізім бойынша таңдауға, оның инерция моментін анықтау, механикалық сипаттамаларын тұрғызуға, қисық өтпелі процестерге және М(t) қозғалтқыштың жүктемелік диаграммасын тұрғызуға болады. Соңғы негізінде таңдалынған қозғалтқыштың қатты қыздыру және артық жүктеу амалы бойынша тексеру жүргізіледі. Артық жүктеу амалы бойынша тексеру, орындау шарттын тексеруге алып келеді.
![]() (14.3)
(14.3)
мұндағы ММАКС– қозғалтқыштың жүктемелік диаграммасындағы максималды момент;
МДОП – қозғалтқыш моментін артық жүктеу бойынша жіберу.
МП – қозғалтқыштың жіберу моменті.