

29,42,57) Электр жетегі қозғалысының теңдеуі
Электржетек қозғаласының теңдеуі. Механикалық жүйенің қозғалтқыштың айналатын бөлігінен (ротор немесе статор РД) және механизмнің айналып қозғалатын жұмысшы бөлігін, қозғалтқыштың білігіне жалғастырылған жай түрін қарастырайық. Жүйеде екі момент іс-әрекет жасайды – қозғалтқыш дамытқан МД және оған механизмнің жұмысшы бөлігімен жасалған және үйкеліс моменті арқылы жасалған статикалық жүктеме моменті МС. Бұл моменттер іс-әрекет бағыты мен өлшеміне байланысты сипатталады. Егер МД және МС қозғалыс бағытымен іс-әрекет жасаса, оларды қозғалатын, егер де олардың белгілері жылдамдық белгісіне қарама-қарсы болса, моменттерді тежелгіш деп атайды. Деламбер принципіне сәйкес МД және МС арасындағы іс-әрекет, жүйе үдеуін анықтайтын динамикалық моменттің белгісін және өлшемін анықтайды. Сонымен, жүйе қозғалысының теңдеуі жалпы жағдайда мына түрде болады
. (1.1)
ЭЖ жұмысының қозғалтқыштық режімі үшін (1) теңдеуге жай талдау келтіреміз, онда
. (1.2)
МД >МС dω/dt > 0 болғанда жетектің үдеу режімі орын алады, МД < МС dω/dt < 0 болғанда жетектің баяулау режімі орын алады, ал МД = МС болғанда динамикалық момент пен үдеу нөлге тең болады. Алғашқы екі режімдер өтпелі, ал соңғысын орнықты (стационар) деп атайды.
Электр жетегі қозғалысының теңдеуі
Электр жетегінің тұрақтанған режим жұмысында қозғалтқыштың айналдырушы иінкүші механизмнің кедергі иінкүшіне тең және жетектің жылдамдығы тұрақты болады. Электр жетегінің бір тұрақтанған жұмыс күйінен екінші күйіне өткен кезде анықталған заңдар бойынша инерция күшінің пайда болуына байланысты жүйедегі жылдамдық, иінкүш және ток өзгереді, бұл процесс өтпелі процесс деп аталады. Олардың пайда болу себептері – қозғалтқыш білігіндегі жүктеменің немесе электр жетегінің басқарушы әрекетінің өзгеруі, яғни іске қосу, тежеу, айналу бағытын өзгерту және т. б. режимдері орын алады. Бұл жағдайда түзу қозғалыс күштерінің теңесу теңдеуін мына түрде жазуға болады
![]() ,
(1.4.1)
,
(1.4.1)
Мұнда F – механизмнің кедергі күшімен Fс теңесетін қозғаушы күш;
![]() –
жылдамдық
өзгерген кездегі инерция күші;
–
жылдамдық
өзгерген кездегі инерция күші;
m – дене массасы.
Механизмге әсер етуші күштің өлшем бірлігі кг м∙с-2.
Айналмалы қозғалыс үшін иінкүштер теңесуінің теңдеуі немесе электр жетегінің қозғалыс теңдеуі мына түрде жазылады
![]() .
(1.4.2)
.
(1.4.2)
Электр
қозғалтқышының айналдырушы иінкүші
оның білігіндегі кедергі иінкүші Мс
мен динамикалық иінкүшімен
![]() теңеседі,
мұнда жетектің инерция иінкүші көптеген
өндірістік механизмдер үшін
теңеседі,
мұнда жетектің инерция иінкүші көптеген
өндірістік механизмдер үшін
![]() тұрақты:
тұрақты:
M
Мс кезінде;
![]()
0 - жетек үдеу режимінде;
0 - жетек үдеу режимінде;
М Мс кезінде; < 0 - жетек баяулау режимінде;
= 0 кезінде жетек тұрақтанған жұмыс режимінде болады.
Динамикалық иінкүш электр жетегінің тек ғана өтпелі режимінде, жылдамдық өзгергенде пайда болады. Бұл иінкүш қозғалысқа қарсы бағытталған, тежеу кезінде ол қозғалысты ұстап тұрады. Осыны есепке алып, жетектің қозғалыс теңдеуінің жалпы жағдайдағы түрін аламыз
![]() .
(1.4.3)
.
(1.4.3)
30) АҚ-ты реттелетін электржетектер
Айнымалы токтағы электрқозғалтқыштың айналу роторының жиілігін былай анықтауға болады
![]()
где
f
-
қоректенетін кернеу жиілігі;pп
–
полюс жұптарының саны;s
–
тайғанау. Полюстер жұптарының санының
қосылу сұлбасының түрлері әртүрлі.
Қажет болған жағдайда ормадағы кернеуді
өзгертеді. Ол кезде ораманы үшбұрышты,
екі ушбұр., жұлд.үшбұрышты т.б. пайдаланады.
Бұл түрдегі реттеу станоктарда, жүк
көтеруде қолданылады. Электрқозғалтқыш
айналу жиілігінің реттелуі, оның
тайғанауының өзгеруі. ЭҚК не қосымша
кедергінің АҚ роторы шынжырының кірісіне
және электрқозғалтқыш статорының
кернеуінің өзгеруіне негізделген.
Қозғ-ң фазалық ротор шынжырындағы
қосымша кернеудің өзгеруі қозғ-ң мех.
Сипаттамасының түрін және сорғыштық
агрегаттық айналу жиілігін де өзгертуге
мүмкіндік береді.
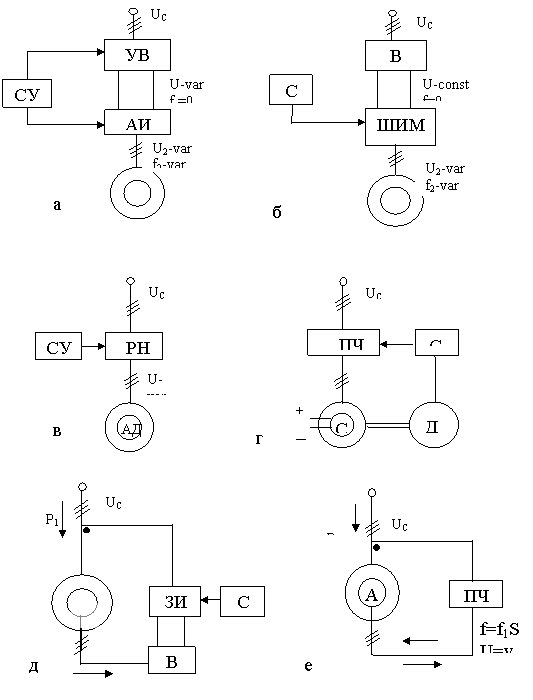
Электрқозғ-ң айналу жиілігінің реттелуі, оның статорындағы кернеудің өзгеруінен кернеудің тиристорлы реттелуі асинх.қозғ. жүйесі арқылы жүзеге асады(9.1в-сурет).АҚ қозғ-ң айналу моменті электрқозғ. Жүргізілген кернеу квадратына пропорционал.
Электржетекте асинхронды вентильді каскад сұлбасы бойынша (9.1д-сурет) электр қозғ.ң айналу жиілігінң реттелуі ЭҚК инверторға қарсы,фазалық асинхронды электр қозғ.ң роторының шынжырына түзетілген ток енгізілген. Ротордың тайғанау энергиясы, қоректендіретін электрлік торға, басқарылатын түзеткіш және тәуелді мнвертордан тұратын АВК түрлендіргіші арқылы беріледі.
Вентильді қозғалтқыш жиілік түрлендіргішінен, синхронды электр қозғалтқыш және оның роторының кеңістікте қалай орналасқанын көрсететін құрылғыдан (9.1г-сурет) тұратын электр механикалық жүйе . Түрлендіргіштен тұрақты тоқтың анық көрсетілген түйіндерде және басқару түзеткіштерінде және инверторда орындалады.