3. Силовой расчет механизма
Задачи силового расчета: определение реакций в кинематических парах; уравновешивающей силы (Рур) или уравновешивающего момента (Мур).
Расчет выполнен двумя методами - методом планов и методом рычага Жуковского.
3.1. Силовой расчет механизма методом планов
Метод планов базируется на принципах механики - принципе Даламбера и принципе заменяемости связей.
Расчет проводят, начиная с наиболее удаленной от исходного механизма структурной группы, и заканчивают расчетом исходного механизма.
Исходными данными для расчета являются: кинематическая схема; все кинематические размеры; массы звеньев m1, m2, m3; положения центров масс S1 и S2 кривошипа и шатуна; данные кинематического расчета; диаграмма силы полезного сопротивления и ее максимальное значение Р.
3.1.1. Силовой расчет структурной группы
Кинетостатический расчет механизма выполнен для двух его положений (5 и 4).
Расчет начинается с определения внешних сил, действующих на звенья, входящие в структурную группу. К ним относятся силы тяжести G2 и G3, силы инерции, сила полезного сопротивления Рпс.
Сила тяжести i-го звена (i=2,3) вычисляется по формуле
 ,
где mi
- масса i-го
звена; g
- ускорение свободного падения, g
=
9,8 м/с2.
,
где mi
- масса i-го
звена; g
- ускорение свободного падения, g
=
9,8 м/с2.
Сила тяжести шатуна:
 .
.
Сила тяжести ползуна:
 .
.
В соответствии с принципом Даламбера вычисляем силы инерции ползуна и шатуна. Для расчета сил инерции шатуна заменим его двумя точечными массами mA2 и mB2, расположенными в центрах шарниров А и В.
 кг;
кг;
 кг.
кг.
Силы инерции замещающих масс:
 Н;
Н;
 Н.
Н.
Сила инерции ползуна:
 Н.
Н.
Для определения силы полезного сопротивления Pncj в рассматриваемом j-м положении механизма над разметкой строится диаграмма силы полезного сопротивления (рис. 7). Ось абсцисс диаграммы параллельна направляющей t-t ползуна, а начало ее системы координат соответствует началу рабочего хода механизма, т.е. точке В0 на разметке. Ось ординат направлена перпендикулярно t-t.
Масштабный коэффициент μр диаграммы Pпс(SB) вычисляется по формуле
μр
= Р(Н)/Р(мм),
где
 -
длина отрезка, которым максимальное
значение силы Р
изображается на диаграмме.
-
длина отрезка, которым максимальное
значение силы Р
изображается на диаграмме.
μр = 600000/60 = 10000 Н/мм.
Для
определения значения Рпс5
силы полезного сопротивления в расчетном
5-м положении механизма из точки В5
на траектории движения ползуна
восстанавливаем перпендикуляр к оси
t-t
до пересечения с графиком Pпс(SB).
Измеряем ординату
 в миллиметрах. Величина силы полезного
сопротивления вычисляется по формуле
в миллиметрах. Величина силы полезного
сопротивления вычисляется по формуле
 Н.
Н.
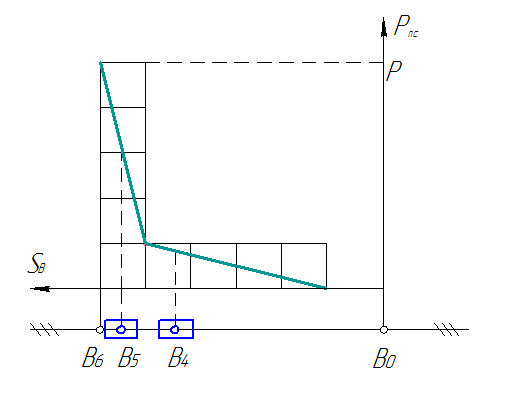
Рис. 7.
На рис. 8 приведена схема нагружения структурной группы в 5-м положении механизма.
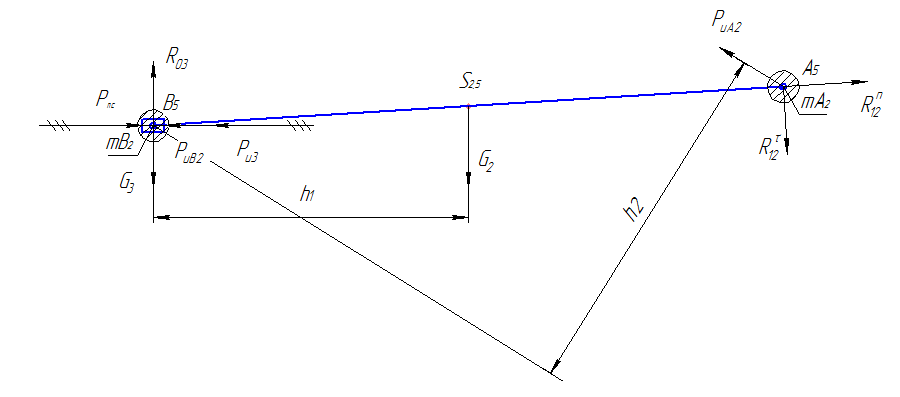
Рис. 8. Схема нагружения структурной группы
Под
действием указанной системы сил
структурная группа находится в равновесии.
В равновесии находится и каждое звено
этой группы. Реакция
 определяется
по условию равновесия системы сил,
действующих на шатун:
определяется
по условию равновесия системы сил,
действующих на шатун:
 .
.
Плечи сил измеряются в мм на схеме нагружения.
 Н.
Н.
Знак реакции свидетельствует о том, что ее направление соответствует указанному на схеме нагружения.
Условие равновесия системы сил, действующих на структурную группу:
 .
(3.1)
.
(3.1)
Графическое решение уравнения (3.1) приведено на рис. 9.
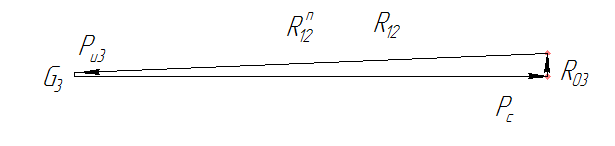
Рис. 9. План сил
Масштабный коэффициент плана сил:
 ,
где
,
где
 -
длина отрезка, которым сила полезного
сопротивления изображается на плане
сил.
-
длина отрезка, которым сила полезного
сопротивления изображается на плане
сил.
μр = 155000/77,5 = 2 кН/мм.
Точку
приложения реакции
 определяем по условию равновесия системы
сил, действующих на ползун.
определяем по условию равновесия системы
сил, действующих на ползун.
 .
.
Реакция не равна нулю, следовательно, х=0. Таким образом, линия действия реакции проходит через геометрический центр шарнира В.
Расчет модулей искомых реакций: