

Расчет ускорений
Расчет ускорений начинаем с определения ускорения точки А по формуле:
 м/с2.
м/с2.
Ускорение аB точки В шатуна связано с ускорением в точки А зависимостью:
 ,
(2) где
,
(2) где
 -
переносное ускорение,
-
переносное ускорение,
 -
нормальная составляющие относительного
ускорения точки В,
-
нормальная составляющие относительного
ускорения точки В,
 -
тангенциальная составляющие относительного
ускорения точки В.
-
тангенциальная составляющие относительного
ускорения точки В.
Ускорение направлено параллельно кривошипу, ускорение направлено параллельно шатуну, а - перпендикулярно АВ.
Величина нормальной составляющей относительного ускорения вычисляется по формуле:
 м/с2.
м/с2.
Ускорение
 направлено параллельно направляющей
t
- t
ползуна.
направлено параллельно направляющей
t
- t
ползуна.
Графическое решения уравнения (2) для пятого положения механизма показано на рис. 5.
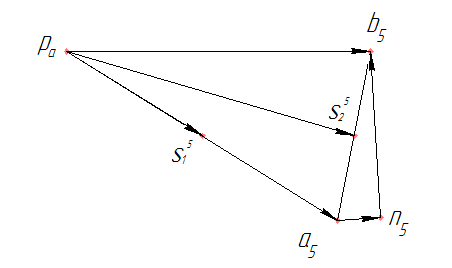
Рис. 5. План ускорений
Масштабный коэффициент плана ускорений:
 .
.
Длина отрезка, которым на плане ускорений изображается ускорение

 .
.
Ускорение аS1 и aS2 центров масс звеньев определяются по свойству подобия плана ускорений.
 откуда
следует, что
откуда
следует, что
 .
.
Отрезок
 откладываем на плане ускорений (рис. 5)
от полюса на прямой
откладываем на плане ускорений (рис. 5)
от полюса на прямой
 , получаем точку s1.
Отрезок
изображает в масштабе
, получаем точку s1.
Отрезок
изображает в масштабе
 ускорение
ускорение
 центра масс кривошипа.
центра масс кривошипа.
Для
определения ускорения
 центра
масс шатуна составим пропорцию
центра
масс шатуна составим пропорцию

Из
пропорции следует, что

Отрезок
откладываем на плане ускорений (рис. 5)
от точки а5
на прямой
,
получаем точку s2.
Соединим ее с полюсом плана ускорений.
Отрезок
 изображает ускорение точки s2.
изображает ускорение точки s2.
Расчет ускорений:
Угловое ускорение шатуна

Результаты расчет ускорений представлены в табл. 2.
Таблица 2
Ускорение |
aA |
aB |
aAB |
as1 |
as2 |
|
|
ε2 |
|
№ п/п |
|||||||||
|
м/с2 |
1/с2 |
|||||||
№5 |
16,9 |
16,06 |
9,1 |
8,44 |
15,84 |
8,82 |
2,26 |
22,05 |
|
№4 |
6,74 |
14,98 |
10,44 |
14,96 |
0,71 |
19,8 |
|||


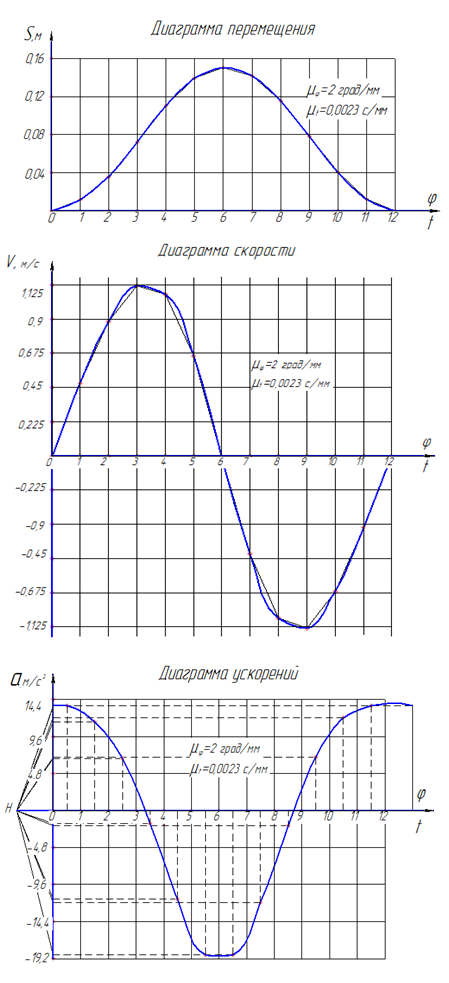
2.2. Кинематический анализ методом кинематических диаграмм
Данный метод является графическим методом кинематического анализа и используется для более наглядного представления изменений кинематических характеристик (перемещение, скорость и ускорение) звена или точки звена за цикл.
На оси абсцисс (рис. 6, а) откладываем отрезок длиной L = 180 мм. Он изображает в масштабе μφ угол поворота кривошипа за один его оборот.
 .
.
Если угол поворота кривошипа измеряется в радианах, то
 .
.
Отрезок L изображает время цикла tц .
 .
.
 .
.
Масштабный коэффициент μS оси ординат принят равным μl.
μS =0,002 м/мм.
Для
построения диаграммы перемещения (рис.
6, а) определим длину отрезка
 ,
который в масштабе
,
который в масштабе
 изображает
угол рабочего хода.
изображает
угол рабочего хода.
 .
.
Отложим
на оси абсцисс от начала координат
диаграммы перемещения отрезок
, разделим его на шесть равных частей и
отрезок
 тоже
делим на шесть равных частей. при этом
обозначим концы отрезков соответствующих
положениям механизма 1, 2, 3, 4, . . . 12.
Получим. Из точек 1, 2, 3, . . . 11 на оси абсцисс
проводим к ней перпендикуляры, на которых
откладываем отрезки В0В1,
В0В2,
В0В3,
и т.д., концы ординат соединяем плавной
кривой.
тоже
делим на шесть равных частей. при этом
обозначим концы отрезков соответствующих
положениям механизма 1, 2, 3, 4, . . . 12.
Получим. Из точек 1, 2, 3, . . . 11 на оси абсцисс
проводим к ней перпендикуляры, на которых
откладываем отрезки В0В1,
В0В2,
В0В3,
и т.д., концы ординат соединяем плавной
кривой.
Оси абсцисс диаграмм скоростей и ускорений совпадают с осью абсцисс диаграммы перемещений.
Для
построения диаграммы скоростей (рис.
6, б) используем данные, приведенные в
таблице 1. Примем масштабный коэффициент
 ,
оси ординат диаграммы V
= V(t)
равным μυ
плана скоростей. Тогда отрезок,
изображающий скорость ползуна на
диаграмме в i
-
м положении механизма, равен
,
оси ординат диаграммы V
= V(t)
равным μυ
плана скоростей. Тогда отрезок,
изображающий скорость ползуна на
диаграмме в i
-
м положении механизма, равен
 при i
= = 0, 1, 2, 3, . . . 12.
при i
= = 0, 1, 2, 3, . . . 12.
=0,01125
 .
.
Для построения диаграммы ускорений (рис. 6, в) использован метод графического дифференцирования диаграммы скоростей .
a)
б)
в)
Рис. 6. Кинематические диаграммы
Проводим
хорду (рис. 6, б), которая соединяет концы
начальной и конечной ординат кривой
V(t)
на рассматриваемом временном интервале.
На оси абсцисс диаграммы ускорений
(рис. 6, в) выбираем точку Р,
находящуюся от начала координат на
расстоянии H
= 20 мм.
Из этой точки проводим луч, параллельный
хорде, до пересечения с осью аВ
. Получаем отрезок, который в масштабе
 изображает среднюю величину ускорения
на рассматриваемом временном интервале.
изображает среднюю величину ускорения
на рассматриваемом временном интервале.
Подобным образом определяем среднее ускорение на всех временных интервалах. В результате получим ряд точек, каждая из которых расположена в середине временного интервала. Соединяем эти точки плавной кривой.
 .
.
Расчет величины ускорения ползуна графическим методом в рассматриваемых положениях механизма:
1). Положение 5

2). Положение 4

Расхождение результатов, полученных методом планов и методом диаграмм, составляет 4,4 % и 0,3 % в положениях 5 и 4 соответственно.
 ;
;
 .
.