

Расчетно-пояснительная записка содержит структурный, кинематический, кинетостатический анализ кривошипно-ползунного механизма рабочей машины и расчет параметров противовесов, обеспечивающих его неполное статическое уравновешивание.
Записка состоит из 25 листов, содержит 12 рисунков, 3 таблицы.
Библиографический список состоит из 3 наименований.
ОГЛАВЛЕНИЕ
Введение…………………………………………………………………………….2
1. Структурный анализ механизма……………………………................……4
2. Кинематический анализ механизма……………………….............….……5
2.1. Кинематический анализ методом планов…………………………….... 5
2.1.1. Разметка механизма……………………………….………........….…...5
2.1.2. Расчет скоростей……………………………………………….....……6
2.1.3. Расчет ускорений……………………………………………….....…....9
2.2. Кинематический анализ методом конических диаграмм……….……..11
3. Силовой расчет механизма…………..…………………..……………...…14
3.1. Силовой расчет методом методом планов………………….………..…14
3.1.1. Силовой расчет структурной группы ............……………….…….…15
3.1.2. Силовой расчет кривошипа………….…………………………….…17
3.2. Определение уравновешивающего момента
методом рычага Н.Е. Жуковского…………………………………………..19
4. Статическое уравновешивание механизма…………………………..…..20
Заключение ……………………………………………………………….....….…21
Библиографический список............………………………………….………....…22
Введение
Теория машин и механизмов - наука, изучающая общие методы структурного и динамического анализа и синтеза различных механизмов.
В данном курсовом проекте выполняется расчет кузнечно-штамповочного автомата по трем основным разделам: структурный, кинематический и кинетостатический анализ.
При структурном анализе механизма определяют число подвижных звеньев, вид кинематических пар, число степеней свободы механизма, число замкнутых контуров и их класс.
При кинематическом анализе определены крайние положения механизма и построена его разметка для 12 положений; методом планов выполнен расчет скоростей и ускорений звеньев и точек звеньев; построены кинематические диаграммы перемещения, скорости и ускорения ползуна.
При кинетостатическом анализе методом планов определены реакции в кинематических парах и уравновешивающий момент. Кроме того, выполнен расчет уравновешивающего момента методом рычага Н.Е. Жуковского.
Все методы, используемые в работе просты и достаточно точны, что не маловажно при инженерных расчетах подобного рода.
1. Структурный анализ механизма
Входе структурного анализа определяется подвижность механизма, количество кинематических пар и подвижных звеньев, строится структурная схема механизма, а также определяется класс и вид механизма.
Рассмотрим кривошипно-ползунный механизм (рис.1) состоящий из 4-х звеньев: 0 – стойка; 1 – кривошип; 2 – шатун; 3 – ползун.
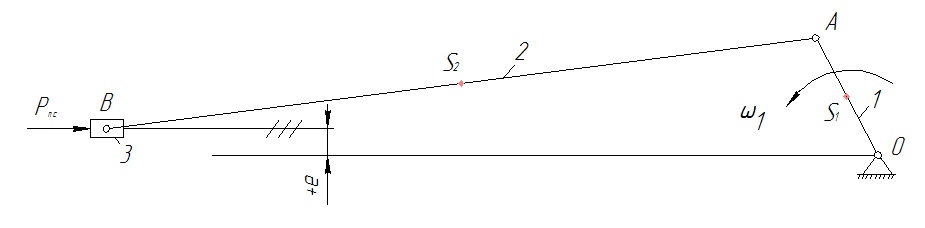
Рис. 1. Кинематическая схема механизма.
Подвижность механизмов определяется по формуле П.Л. Чебышева[1-3]:
W = 3n – 2р5 – р4,
где n – количество подвижных звеньев ,
р5 – количество кинематических пар пятого класса,
р4 – количество пар четвертого класса.
W = 3·3 – 2·4 – 0 = 1.
Следовательно, механизму нужно сообщить одно независимое движение, чтобы обеспечить определенность движения выходного звена.
Составим структурную схему механизма (рис. 2). Механизм состоит из исходного механизма и структурной группы II класса 2 порядка.
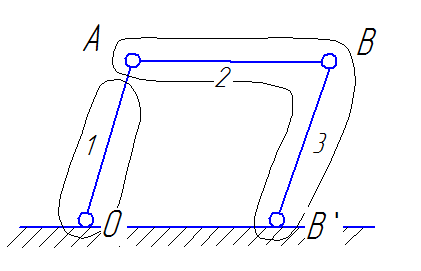
Рис. 2.
Формула строения механизма:
 .
.
Класс механизма определяется классом наиболее сложной структурной группы.
Класс механизма - II.
2. Кинематический анализ механизма
Целью кинематического анализа является изучение движения звеньев механизма.
Задачи кинематического анализа: определение перемещений, скоростей и ускорений звеньев и точек звеньев. К задачам кинематики применим метод планов и методом диаграмм.
2.1. Кинематический анализ методом планов
Кинематический анализ методом планов (графоаналитический метод) достаточно прост, нагляден и имеет достаточную для инженерных расчетов точность. Его суть в том, что связь между скоростями и ускорениями описывается векторными уравнениями, которые решаются графически.
2.1.1. Разметка механизма
Для определения скоростей и ускорений методом планов необходимо построить разметку механизма (рис. 3).
Разметка механизма – это ряд последовательных положений механизма, построенный в зависимости от положений входного звена, охватывающих весь цикл его движения. Для построение разметки механизма необходимо выбрать масштабный коэффициент.
Масштабный коэффициент - это отношение физической величины к длине отрезка, изображающего эту величину, выраженной в миллиметрах.

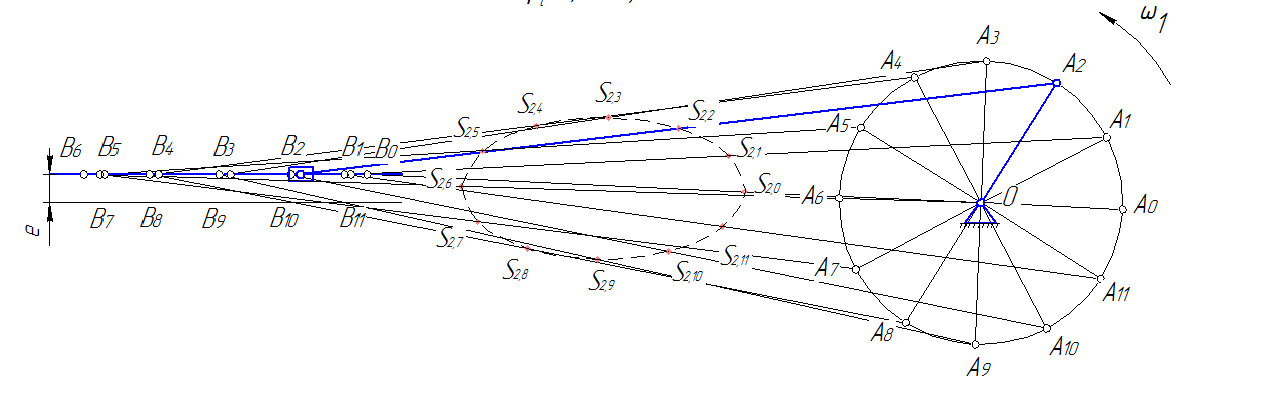
Рис. 3. План положений механизма
Для построения разметки находим крайние положения механизма. Крайними называется положения, в котором скорость выходного звена равна нулю, т.е. выходное звено меняет направление своего движения.
Найдем крайние положения механизма и построим разметку механизма:
1. Из точки О на прямой t-t делаем засечки раствором циркуля ОА + АВ и АВ – ОА, таким образом получив точки B' и B" соответственно.
2. Соединяем точку B' с точкой О и доводим до окружности. На пересечении окружности радиусом ОА и прямой ОB' отмечаем точку А'.
2.1. Соединяем точку B" с точкой О . На пересечением прямой ОB" с окружностью ОА получаем точку А". Отрезки ОА" и А"В" изображают кривошип и шатун во втором крайнем положении.
3. Измеряем угол рабочего хода и делим его на шесть равных частей, тоже самое проделываем с углом холостого хода.
4. Раствором циркуля равным АВ из точек А1, А2, А3 и т.д. на прямой t-t делаем засечки. Точки А и В с одинаковыми номерами соединяем.
В каждом положении механизма в соответствии с исходными данными определяем положения центров масс S1 кривошипа и S2 шатуна, и строим траектории их движения.