

1.9 Определение 3d терминов
На рисунках 1.7 и 1.8 продемонстрирована прямая линия 3D съемки, вид сверху, с большинством определений, используемых в данном курсе. Используйте эти диаграммы для справки.
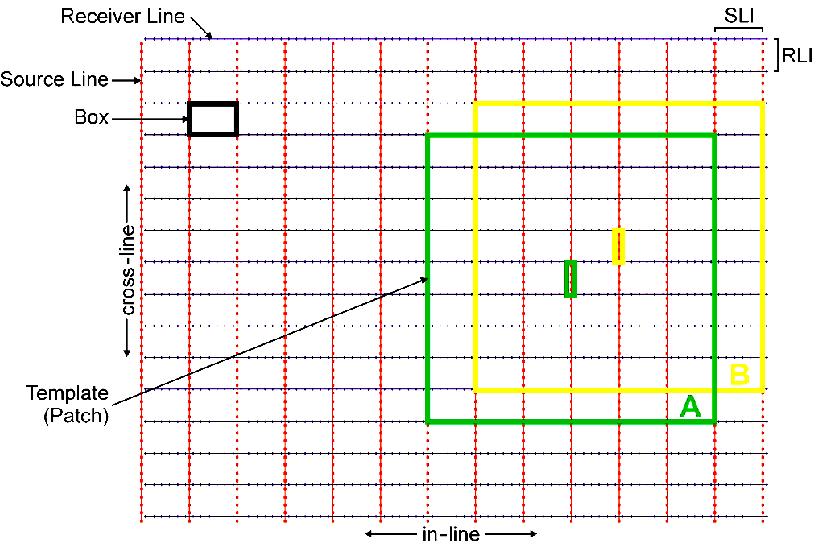
Рис. 1.7. Направление In-line — параллельно линиям приема; Направление X-line — Перпендикулярно линиям приема
Линия Возбуждения
Линия (возможно, дорога), вдоль которой расположены пункты возбуждения (например, динамит или вибраторы) через равные интервалы. Расстояние между ПВ на линии (интервал между пунктами возбуждения, ИПВ) равно обычно размеру бина Общей Средней Точки (ОСТ) по направлению Х – линии, умноженному на 2. Это гарантирует, что средние точки, связанные с каждым пунктом возбуждения будут располагаться точно одна средняя точка от точек, связанных с предыдущим пунктом возбуждения на линии. Расстояние от одной линии возбуждения до другой обычно называется Расстояние между Линиями Возбуждения (РЛВ). РЛВ и ИИ определяют плотность пунктов возбуждения – или сколько пунктов возбуждения находится на 1 кв. км.
Линия Приема
Линия (возможно, дорога или расчищенная линия через кустарник (заросли)), вдоль которой размещаются приемники через равные интервалы (интервал между пунктами приема, ИПП), которые обычно равны размеру на линии бина ОСТ, умноженному на два. Обычно вдоль таких линий раскладываются сейсмокосы с прикрепленными, как это нужно, сеймоприемниками. Расстояние от одной линии приема до другой обычно называется как расстояние между линиями приема (РЛП). Как мы видим, метод расположения линий приема и возбуждения может значительно варьироваться, но всегда необходимо следовать простым правилам.
Клетка (часто называется Ячейка)
В 3D съемках с прямыми линиями так называется территория, ограничиваемая двумя прилегающими линиями возбуждения и двумя прилегающими линиями приема (рис. 1.7 и 1.10). Самое интересное заключается в том, что клетка является наименьшей площадью 3D съемки, которая включает в себя полную статистику съемки. В съемках с прямыми линиями бин со средней точкой, расположенный точно в центре ячейки, будет регистрировать данные от многих пар источник-приемник, но самая короткая трасса выноса для этого бина будет самой длинной минимальной трассой выноса для всей съемки.
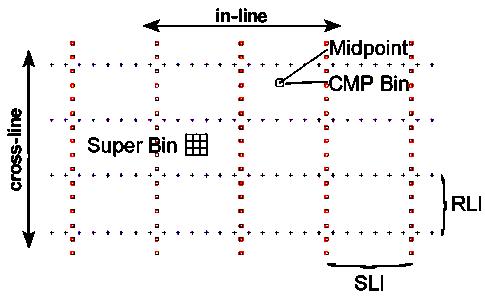
Рис. 1.8.
Другими словами, минимальные выносы во всех ОСТ бинах, минимальный вынос в бине в центре ячейки будет самым большим (X min – так обычно обозначается наибольший минимальный вынос или НМВ). Мы вкратце увидим, как различные стратегии расположения позволяют работать с этим феноменом.
Пэтч (Заплата)
Пэтч относится ко всем имеющимся пунктам для любого пункта возбуждения в 3D съемке. Обычно формируется прямоугольник из нескольких параллельных линий приема. Пэтч передвигается по всей территории съемки для охвата различных положений образца.
Образец
Образец – это комбинация конкретной заплатки приема, в которой записывается некоторое количество ПВ. Эти ПВ могут находиться как в пределах заплатки, так и вне них.
Образец = Заплатка + соответствующие ПВ
Просека (Полоса)
Полоса использовалась в различных значениях в индустрии. Во-первых, она применялась при использовании параллельных и соответствующих (совпадающих) линий приема и возбуждения для создания подповерхностных точек между ними. Сейчас она может использоваться в качестве образца или даже серии образцов, которые растягиваются по всей ширине территории съемки. Также она часто используется для описания параллельной геометрии в противовес ортогональной геометрии.